


Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
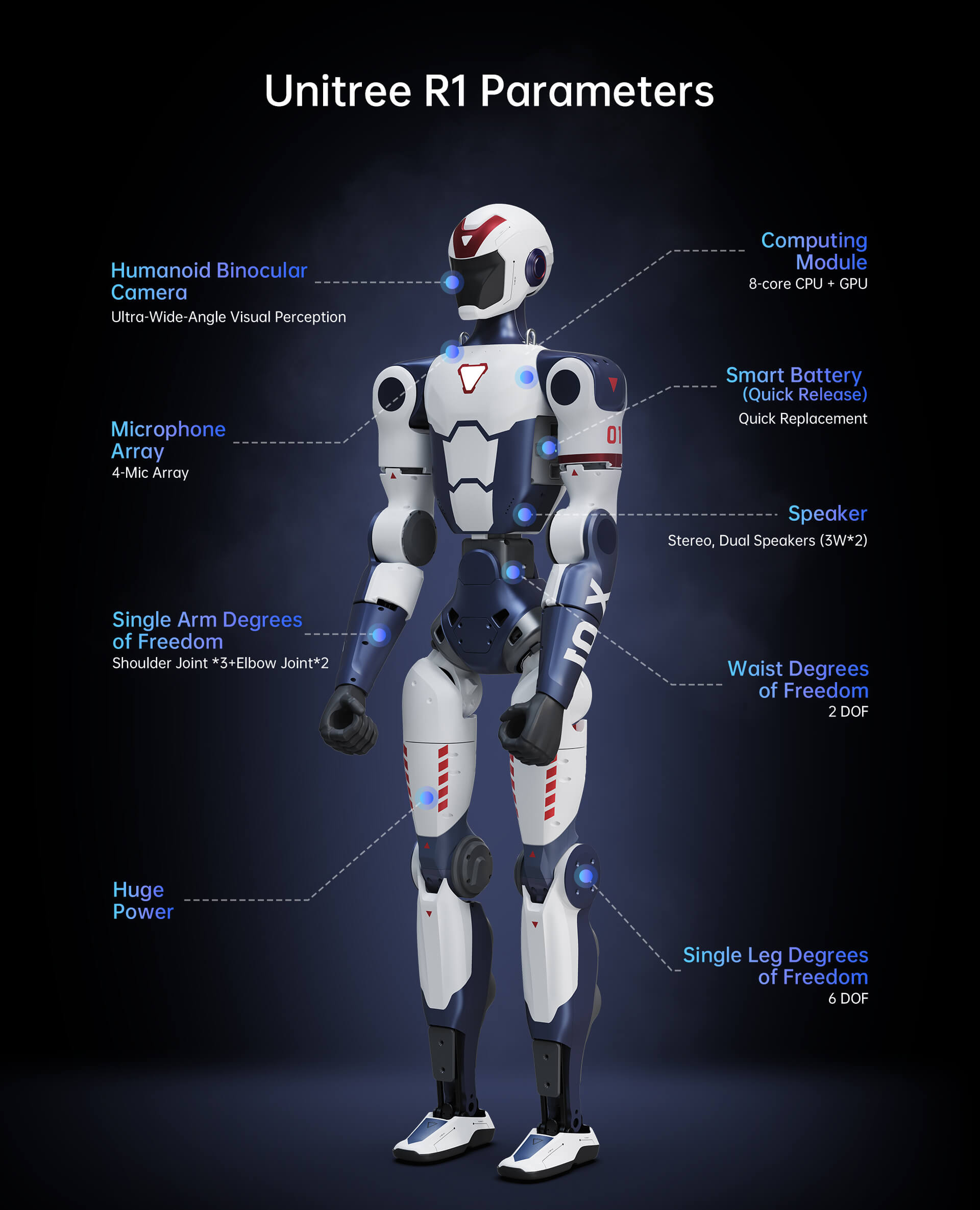
Der Unitree R1 Edu ist eine F&E- und Lehrplattform im humanoiden Format mit Fokus auf Lokomotion, Manipulation und On-Board-KI, inklusive Zugang zu High- und Low-Level-Programmierung sowie Simulation (z. B. Isaac Sim).




Der Unitree R1 Edu ist eine F&E- und Lehrplattform im humanoiden Format mit Fokus auf Lokomotion, Manipulation und On-Board-KI, inklusive Zugang zu High- und Low-Level-Programmierung sowie Simulation (z. B. Isaac Sim).





