


Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
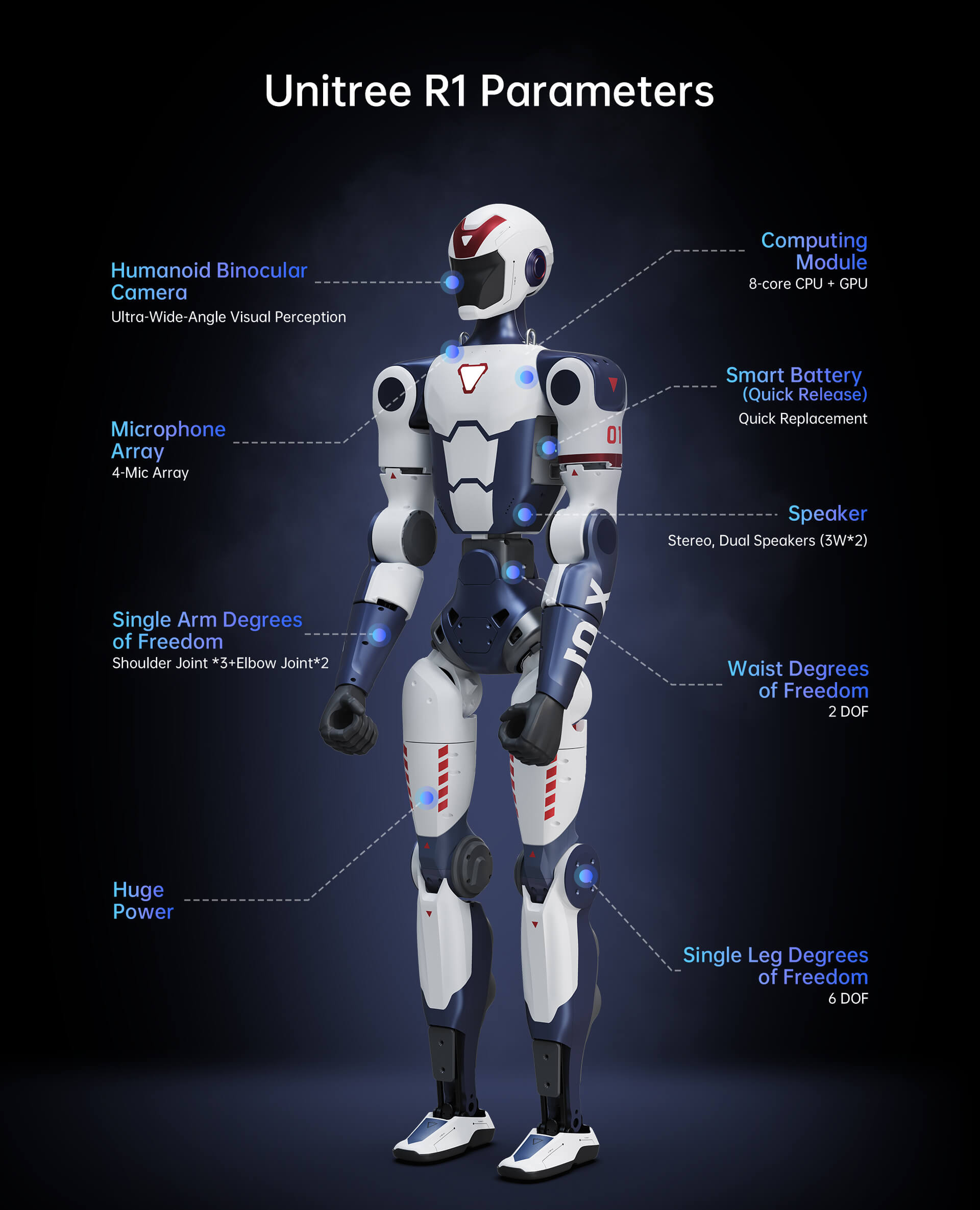
Unitree R1 Edu è una piattaforma umanoide per R&S e didattica incentrata su locomozione, manipolazione e IA a bordo, con accesso alla programmazione di alto e basso livello e alla simulazione (ad es. Isaac Sim).




Unitree R1 Edu è una piattaforma umanoide per R&S e didattica incentrata su locomozione, manipolazione e IA a bordo, con accesso alla programmazione di alto e basso livello e alla simulazione (ad es. Isaac Sim).





