


Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
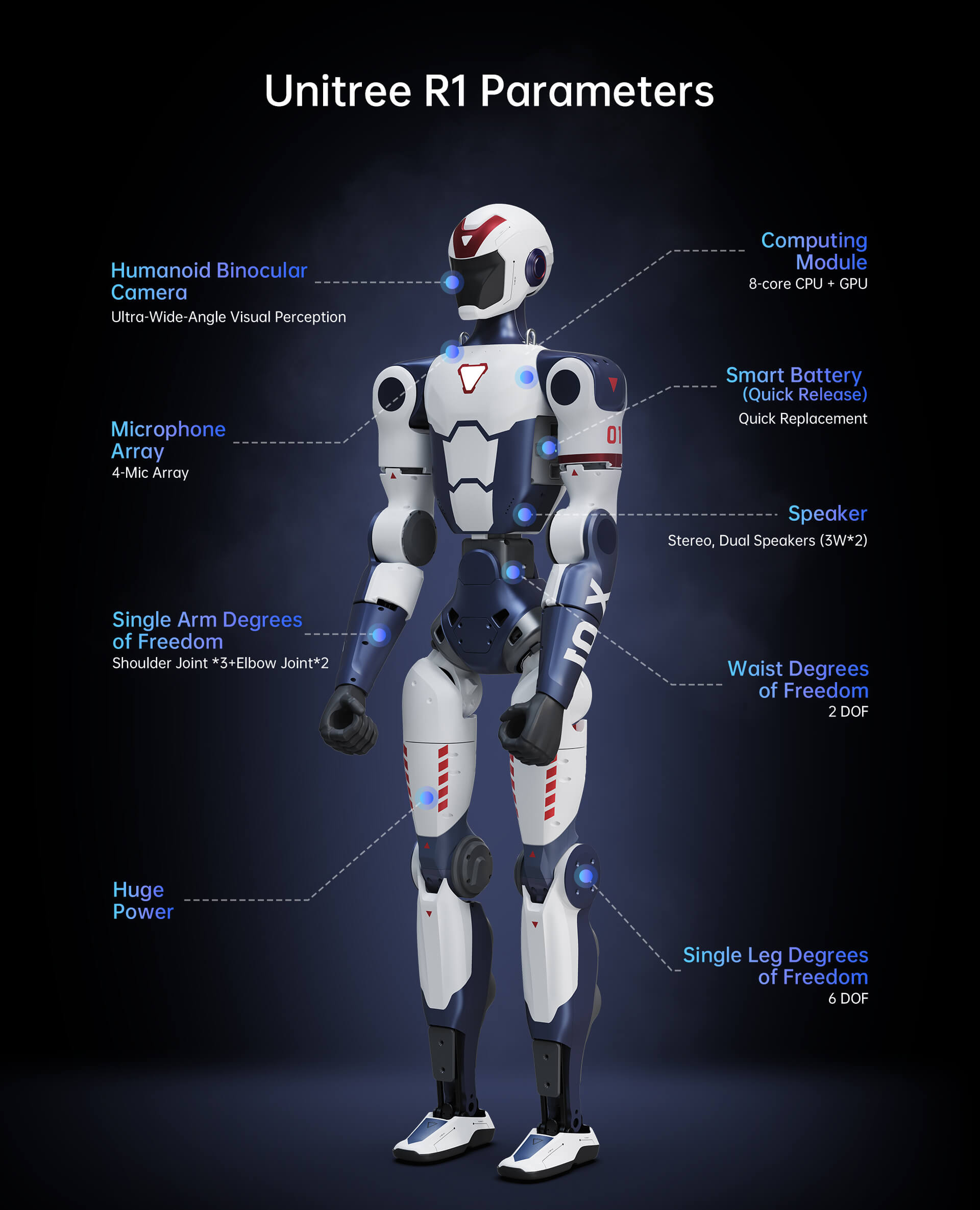
The Unitree R1 Edu is an R&D and education humanoid platform focused on locomotion, manipulation, and on-board AI, with access to high- and low-level programming and simulation (e.g., Isaac Sim).




The Unitree R1 Edu is an R&D and education humanoid platform focused on locomotion, manipulation, and on-board AI, with access to high- and low-level programming and simulation (e.g., Isaac Sim).





