


Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
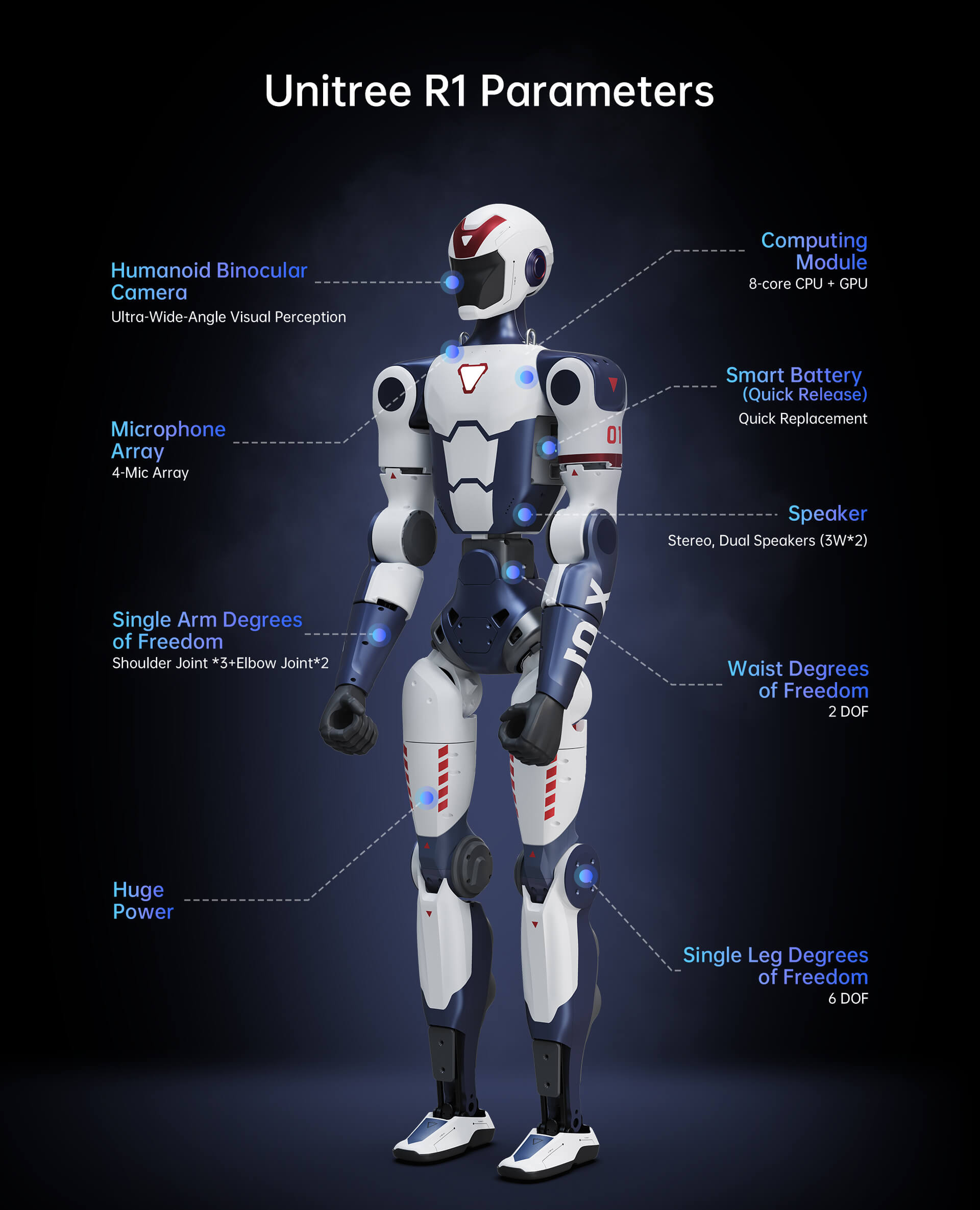
Le R1 Edu d'Unitree est une plateforme humanoïde de R&D et d’enseignement centrée sur la locomotion, la manipulation et l’IA embarquée, avec un accès à la programmation haut et bas niveau et à la simulation (ex. Isaac Sim).




Le R1 Edu d'Unitree est une plateforme humanoïde de R&D et d’enseignement centrée sur la locomotion, la manipulation et l’IA embarquée, avec un accès à la programmation haut et bas niveau et à la simulation (ex. Isaac Sim).





