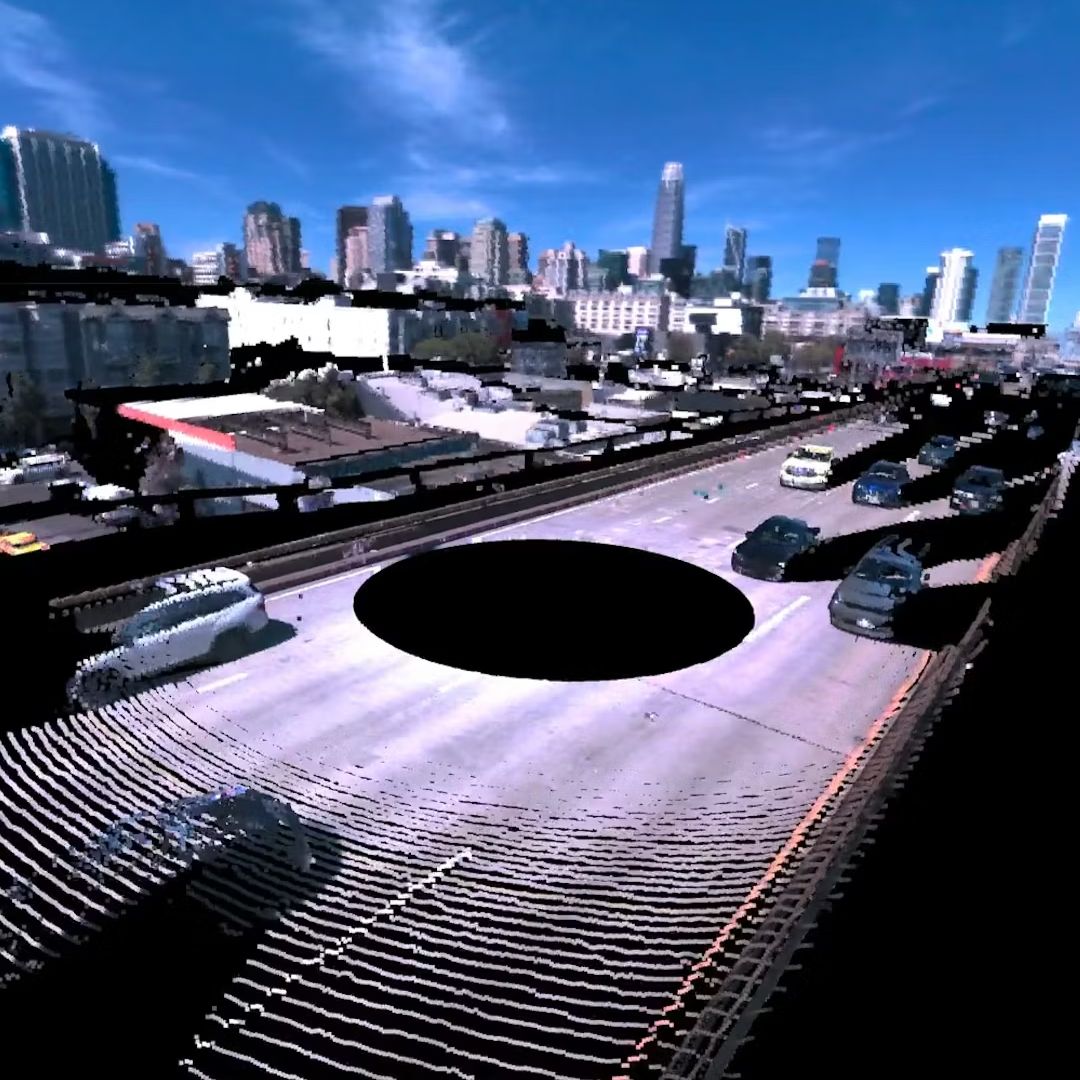
Der Ouster OS0 REV8 LiDAR kann in Projekten eingesetzt werden, in denen ein ultraweites Sichtfeld, dichte 3D-Wahrnehmung und eine sehr geringe Mindestdistanz kombiniert werden sollen. Er eignet sich für Systeme, die ihre unmittelbare Umgebung präzise beobachten müssen und dabei eine konfigurierbare Frequenz sowie eine in Entwicklung und Betrieb nutzbare Datenrate beibehalten sollen.
- AMR und AGV: Hinderniserkennung, lokale Navigation, Bewegungssicherheit und eingebettete Wahrnehmung.
- Industrierobotik: 3D-Wahrnehmung für Automatisierung, Inspektion und Logistikumgebungen.
- Drohnen und Spezialroboter: lokale Kartierung, Näheerkennung und Szenenrekonstruktion.
- Autonome Fahrzeuge: Kurzstreckenwahrnehmung mit großer vertikaler Abdeckung.
- Mapping und digitale Zwillinge: Erfassung dichter Punktwolken mit nativen Farbdaten.
- Forschung und Entwicklung: Integration in Workflows mit ROS 2, ROS, MATLAB, NVIDIA Driveworks und Isaac Sim.
Im Integrationskontext verfügt der OS0 REV8 über eine UDP-Ausgabe über Gigabit-Ethernet, eine HTTPS API zur Steuerung sowie Funktionen wie den integrierten 3D Zone Monitor, Multi-Sensor Phase Lock, Azimut-Masking und einen Low-Power-Standby-Modus. Damit eignet er sich als Arbeitsbasis für Projekte in den Bereichen Navigation, Sensordatenfusion, Zonenüberwachung oder robotische Bildverarbeitung.
Technische Spezifikationen des Ouster OS0 REV8 LiDAR
| Typ | Kurzreichweitiger Imaging-LiDAR mit ultraweitem Sichtfeld |
| Hardware-Version | REV8.0 |
| Reichweite bei 80 % Reflektivität | 75 m |
| Reichweite bei 10 % Reflektivität | 35 m |
| Maximal darstellbare Reichweite | 250 m |
| Mindestdistanz | 0,0 m |
| Horizontales Sichtfeld | 360,0° |
| Vertikales Sichtfeld | 90,0° (+45,0° bis -45,0°) |
| Vertikale Auflösung | 32, 64 oder 128 Kanäle |
| Horizontale Auflösung | 512, 1024, 2048 oder 4096 |
| Rotationsrate | 5, 10, 15, 20, 30 oder 40 Hz |
| Winkelabtastgenauigkeit | ±0,01° vertikal / ±0,01° horizontal |
| Entfernungsauflösung | 0,1 cm |
| Messpräzision | von ±0,25 cm bis ±1,5 cm (typisch) |
| Messgenauigkeit | ±1,25 cm auf Lambert-Ziel, ±2,5 cm auf Retroreflektor |
| Anzahl der Echos | bis zu 2 |
| Max. Punkte pro Sekunde | 10 485 760 pts/s |
| Daten pro Punkt | RGB, Entfernung, Signal, Reflektivität, Nahinfrarot, Kanal, Azimutwinkel, Zeitstempel |
| Farbtiefe | 48 Bit insgesamt / 16 Bit pro Kanal |
| Dynamikbereich | 116 dB |
| LiDAR-Verbindung | UDP über Gigabit-Ethernet |
| Steuerungsschnittstelle | HTTPS API |
| IMU | 3-Achsen-Gyroskop + 3-Achsen-Beschleunigungsmesser |
| IMU-Abtastung | 640, 1280 oder 2560 Samples/s |
| Zeitsynchronisation | PTP, gPTP, NMEA $GPRMC, externe PPS, interne Uhr |
| Leistungsaufnahme | 10 bis 20 W, 15 W nominal |
| Nennspannung | 12 VDC oder 24 VDC |
| Spannungsbereich | 9 V bis 58 V DC |
| Abmessungen | 87 mm Durchmesser; Höhe 58,35 mm ohne Thermokappe / 74,2 mm mit Thermokappe |
| Gewicht | 500 g ohne Halo Cap / 580 g mit Halo Cap |
| Betriebstemperatur | -40 °C bis +85 °C |
| Lagertemperatur | -40 °C bis +105 °C |
| Schutzart | IP68 / IP69K |
| Stoßfestigkeit | 100 G |
| Vibrationsfestigkeit | 10 Grms |
| Kompatible Software | Ouster Python SDK, C++ Driver, Ouster Studio |
| Drittanbieter-Integrationen | ROS2, ROS, NVIDIA Driveworks, MATLAB, NVIDIA Isaac, NVIDIA Isaac Sim |
Ressourcen des Ouster OS0 REV8 LiDAR
FAQ zum Ouster OS0 REV8 LiDAR
Wofür wird der Ouster OS0 REV8 LiDAR verwendet?
Der OS0 REV8 dient der eingebetteten 3D-Wahrnehmung in Projekten der mobilen Robotik, Automatisierung, autonomen Fahrzeuge, Drohnen und Kartierung.
Wie groß ist die Reichweite des Ouster OS0 REV8?
Der Sensor bietet eine Reichweite von 35 m auf ein Ziel mit 10 % Reflektivität und eine Reichweite von 75 m auf ein Ziel mit 80 % Reflektivität, bei einer maximal darstellbaren Reichweite von 250 m.
Wie groß ist das Sichtfeld des Ouster OS0 REV8?
Der OS0 REV8 verfügt über ein horizontales Sichtfeld von 360° und ein vertikales Sichtfeld von 90°, was ihn für nahe und komplexe Umgebungen besonders interessant macht.
Liefert der Ouster OS0 REV8 eine Farbpunktwolke?
Ja, der Sensor unterstützt eine native RGB-D-Farbpunktwolke, die für fortgeschrittene Wahrnehmungs- und Szenenanalyse-Workflows nützlich ist.
Ist der Ouster OS0 REV8 mit ROS 2 kompatibel?
Ja, der OS0 REV8 ist kompatibel mit ROS 2, ROS, MATLAB, NVIDIA Driveworks, NVIDIA Isaac und Isaac Sim.
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")
 mit ultragroßem Winkel")

 mit ultragroßem Winkel")