Le LiDAR Ouster OS0 REV8 peut être utilisé dans des projets où l’on cherche à combiner champ ultra-large, perception 3D dense et faible distance minimale. Il est adapté aux systèmes qui doivent observer leur environnement immédiat avec précision, tout en conservant une fréquence configurable et un débit de données exploitable en développement ou en exploitation.
- AMR et AGV : détection d’obstacles, navigation locale, sécurité de déplacement et perception embarquée.
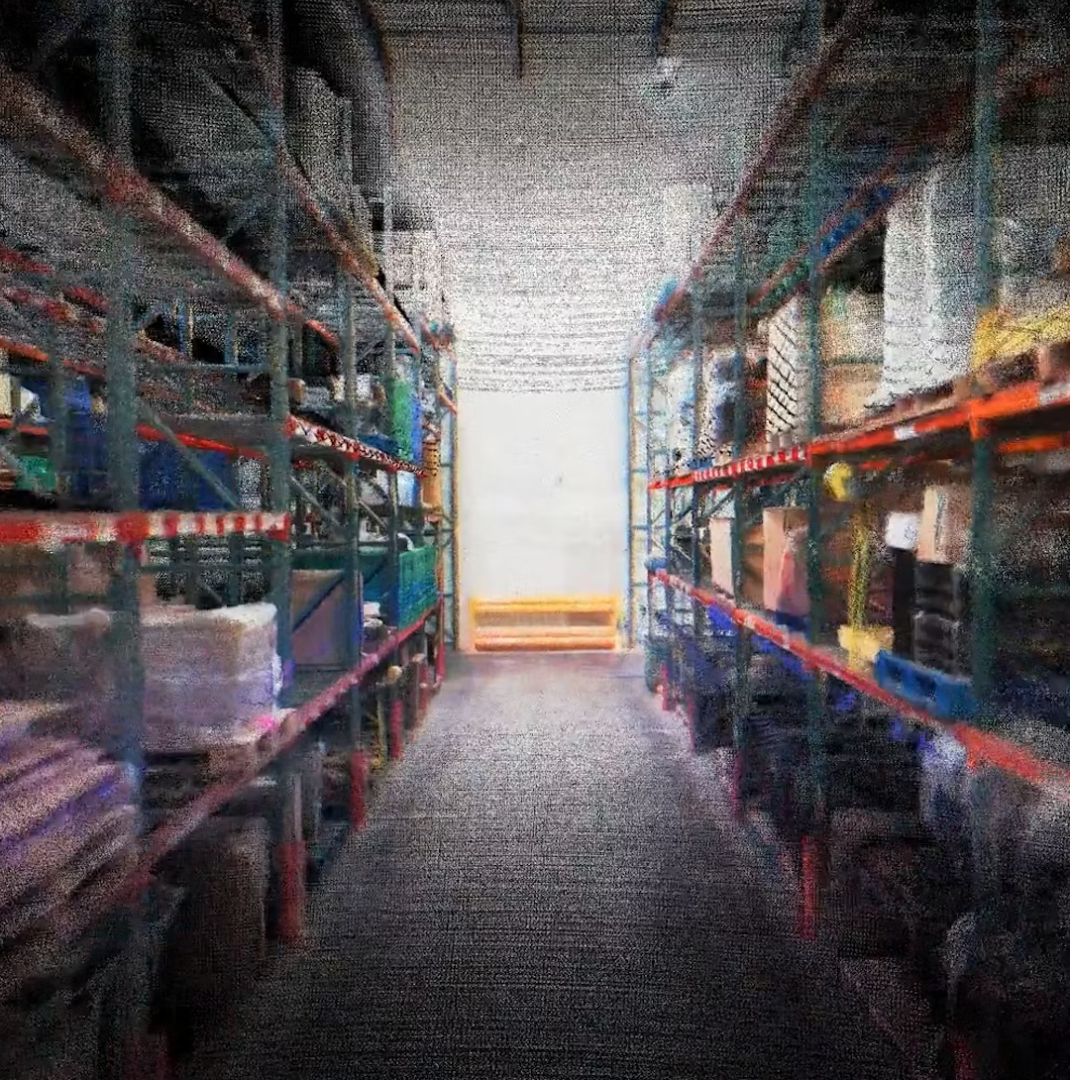
- Robotique industrielle : perception 3D pour l’automatisation, l’inspection et les environnements logistiques.
- Drones et robots spéciaux : cartographie locale, détection de proximité et reconstruction de scène.
- Véhicules autonomes : perception courte portée avec couverture verticale importante.
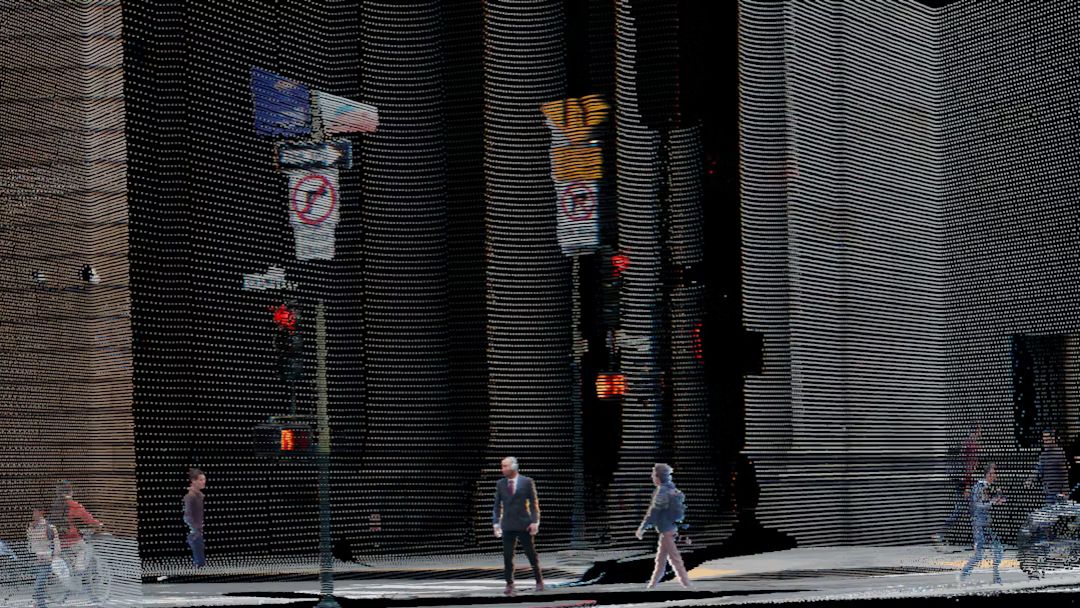
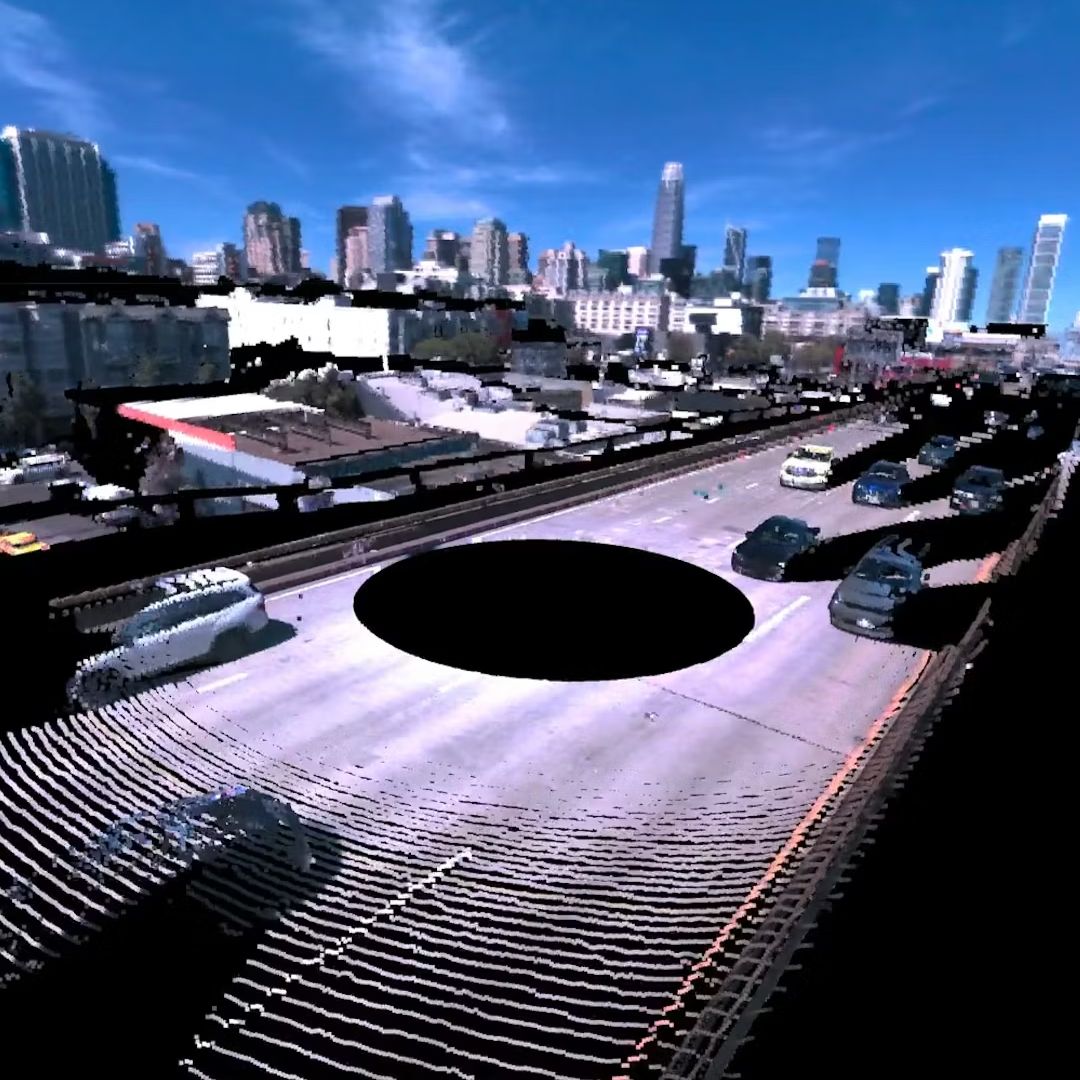
- Mapping et jumeaux numériques : acquisition de nuages de points denses avec données couleur natives.
- Recherche et développement : intégration dans des workflows avec ROS 2, ROS, MATLAB, NVIDIA Driveworks et Isaac Sim.
Dans un contexte d’intégration, l’OS0 REV8 dispose d’une sortie UDP sur Ethernet gigabit, d’une interface de contrôle HTTPS API, de fonctions comme le 3D Zone Monitor embarqué, le phase lock multi-capteurs, le masquage azimutal ou encore un mode low-power standby. Il peut ainsi servir de base de travail pour des projets de navigation, de fusion capteurs, de surveillance de zone ou de vision robotique.
Spécificités techniques du LiDAR Ouster OS0 REV8
| Type | Lidar imageur courte portée à champ ultra-large |
| Version matérielle | REV8.0 |
| Portée à 80 % de réflectivité | 75 m |
| Portée à 10 % de réflectivité | 35 m |
| Portée maximale représentable | 250 m |
| Distance minimale | 0,0 m |
| Champ de vision horizontal | 360,0° |
| Champ de vision vertical | 90,0° (+45,0° à -45,0°) |
| Résolution verticale | 32, 64 ou 128 canaux |
| Résolution horizontale | 512, 1024, 2048 ou 4096 |
| Fréquence de rotation | 5, 10, 15, 20, 30 ou 40 Hz |
| Précision d’échantillonnage angulaire | ±0,01° vertical / ±0,01° horizontal |
| Résolution de distance | 0,1 cm |
| Précision de mesure | de ±0,25 cm à ±1,5 cm (typique) |
| Exactitude de mesure | ±1,25 cm sur cible lambertienne, ±2,5 cm sur rétro-réflecteur |
| Nombre de retours | jusqu’à 2 |
| Points par seconde max. | 10 485 760 pts/s |
| Données par point | RGB, distance, signal, réflectivité, proche infrarouge, canal, angle azimutal, timestamp |
| Connexion lidar | UDP sur Ethernet gigabit |
| Interface de contrôle | HTTPS API |
| IMU | Gyroscope 3 axes + accéléromètre 3 axes |
| Échantillonnage IMU | 640, 1280 ou 2560 échantillons/s |
| Synchronisation temporelle | PTP, gPTP, NMEA $GPRMC, PPS externe, horloge interne |
| Consommation | 10 à 20 W, 15 W nominal |
| Tension nominale | 12 VDC ou 24 VDC |
| Plage de tension | 9 V à 58 V DC |
| Dimensions | 87 mm de diamètre ; hauteur 58,35 mm sans capot thermique / 74,2 mm avec capot thermique |
| Poids | 500 g sans halo cap / 580 g avec halo cap |
| Température de fonctionnement | -40 °C à +85 °C |
| Température de stockage | -40 °C à +105 °C |
| Indice de protection | IP68 / IP69K |
| Résistance aux chocs | 100 G |
| Résistance aux vibrations | 10 Grms |
| Logiciels compatibles | Ouster Python SDK, C++ Driver, Ouster Studio |
| Intégrations tierces | ROS2, ROS, NVIDIA Driveworks, MATLAB, NVIDIA Isaac, NVIDIA Isaac Sim |
Ressources du LiDAR Ouster OS0 REV8
FAQ sur le LiDAR Ouster OS0 REV8
À quoi sert le LiDAR Ouster OS0 REV8 ?
Le OS0 REV8 sert à la perception 3D embarquée dans des projets de robotique mobile, d’automatisation, de véhicules autonomes, de drones et de cartographie.
Quelle est la portée du Ouster OS0 REV8 ?
Le capteur annonce une portée de 35 m sur une cible à 10 % de réflectivité et une portée de 75 m sur une cible à 80 % de réflectivité, avec une portée maximale représentable de 250 m.
Quel est le champ de vision du Ouster OS0 REV8 ?
Le OS0 REV8 dispose d’un champ de vision horizontal de 360° et d’un champ de vision vertical de 90°, ce qui le rend intéressant pour les environnements rapprochés et complexes.
Le Ouster OS0 REV8 fournit-il un nuage de points couleur ?
Oui, le capteur prend en charge un point cloud couleur natif RGB-D, utile pour les workflows de perception avancée et d’analyse de scène.
Le Ouster OS0 REV8 est-il compatible ROS 2 ?
Oui, l’OS0 REV8 est compatible avec ROS 2, ROS, MATLAB, NVIDIA Driveworks, NVIDIA Isaac et Isaac Sim.
 ultra grand angle")
 ultra grand angle")
 ultra grand angle")
 ultra grand angle")

 ultra grand angle")