Composants robotiques (structurels)
Composants robotiques pour la construction de robots DIY. Vous trouverez toutes les pièces nécessaires à l'assemblage de la structure de vos robots ou systèmes automatisés dans cette section : châssis, roues, câbles, profilés, visserie... Vous n'avez plus qu'à les imaginer, les développer et les tester !
















































Kit de démarrage régulier anodisé noir comprenant les poutres, les supports, les écrous et les boulons.

Ajoutez ces roues à votre projet dès aujourd'hui et préparez-vous à conquérir tous les terrains avec facilité !


Découvrez la Roue Omnidirectionnelle 127 mm de Nexus Robot, celle-ci offre une combinaison parfaite de fiabilité, de maniabilité et de durabilité pour vos projets de robotique avancés.


La Roue Mecanum (8 pouces) 203 mm offre une manœuvrabilité améliorée et une grande fiabilité, ce qui en fait un choix idéal pour vos besoins en matière de robotique mobile.


Ce set de 4 roues Mecanum 254 mm est un choix idéal pour les robots mobiles nécessitant une capacité de charge élevée, une maniabilité précise et une adhérence optimale.


Découvrez le Set de roues Mecanum industrielles de 6 pouces avec 8 roulettes en PU offrant une mobilité exceptionnelle et une capacité de charge élevée (150 kg).


Découvrez notre Set de roues mécanum industrielles de 8 pouces avec 12 roulettes en PU, conçu pour offrir une mobilité exceptionnelle et une capacité de charge de 150 kg, idéal pour les applications industrielles ou robotiques exigeantes.


Lot de 12 supports droits MakerBeam en inox.
Voir notre gamme de supports MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL

Besoin de plus de pièces de montage pour l’assemblage de vos profilés ? Voici un lot de 12 équerres MakerBeam, compatibles OpenBeam et MakerBeam XL.


Un kit de profilés OpenBeam complet, avec supports, visserie et tournevis.


Ces équerres MakerBeam vous permettent de concevoir de robustes projets avec les profilés OpenBeam et MakerBeamXL.


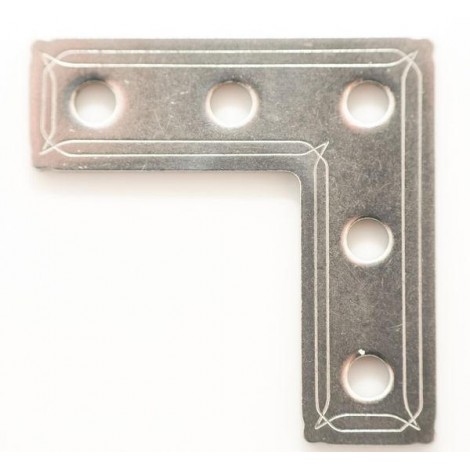
Chaque équerre en L MakerBeam permet la création de projets solides et résistants sur MakerBeam ou OpenBeam.


L'équerre en T MakerBeam s'intègre à tous vos projets conçus avec les profilés OpenBeam et MakerBeamXL.

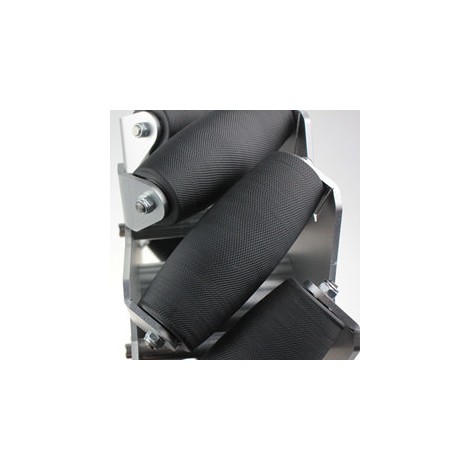
La roue Mecanum (droite) de Nexus Robotics Ltd. Se compose de 12 rouleaux en nylon montés sur deux plaques en aluminium. Elle offre une totale liberté de mouvement à votre robot mobile.

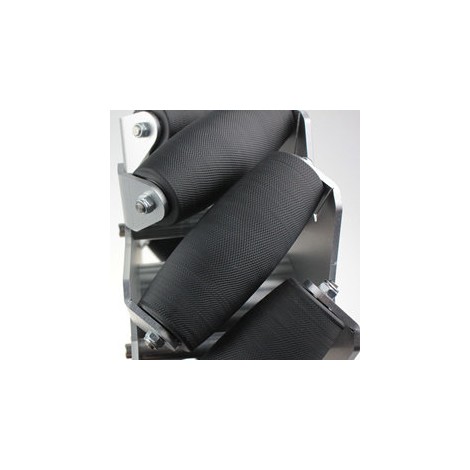
La roue Mecanum (gauche) offre un solide alliage d'aluminium et de nylon pour assurer à votre plateforme mobile un déplacement tout en souplesse et en agilité.


La roulette à bille A01 s'intègre parfaitement au plateau de votre robot Turtlebot 3 Waffle Pi.


Vous souhaitez faire bouger votre capteur caméra Pixy 2 sur 2 axes de mouvements ? Avec ses deux servomoteurs et sa base fixe, le kit pan/tilt saura répondre à vos attentes. Compatible Arduino.

Ce tournevis hexagonal est compatible avec les boulons de la marque MakerBeam.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL

Cette clé Allen (2mm) est compatible avec les boulons à tête carrée de la marque MakerBeam.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL


Ces embouts imprimés en 3D ajouteront un bel aspect fini à votre construction MakerBeam et l'aideront dans sa stabilité. Ils sont faciles à emboîter sur vos profilés et peuvent se réutiliser facilement.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam

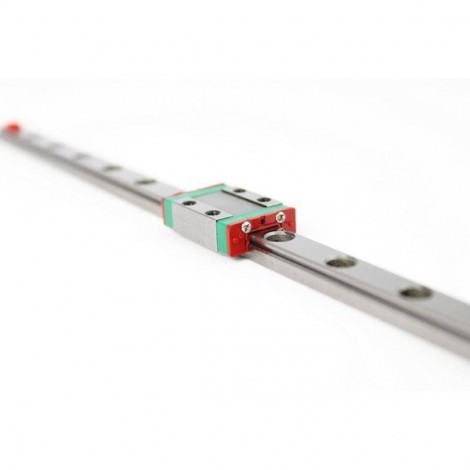
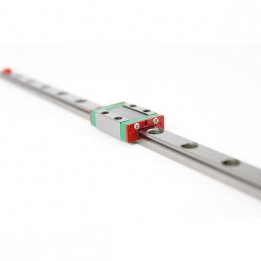
Ce rail de guidage vous aidera à réaliser des constructions MakerBeam solides et droites.
Voir notre gamme d'accessoires MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL


Sachet de 250 écrous standards MakerBeam.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL


Sachet de 100 écrous autobloquants M3 DIN 958 MakerBeam, résistants aux vibrations. Ils peuvent être réutilisés.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL

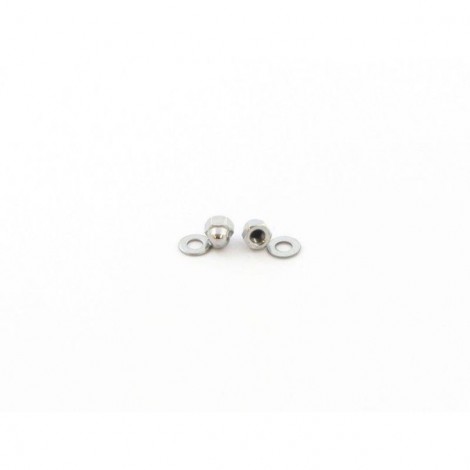
Sachet de 50 bouchons à vis MakerBeam, avec leurs rondelles de fixation.
Voir toute notre visserie MakerBeam.
Compatibilité : MakerBeam, OpenBeam, MakerBeamXL