Contrôleurs de moteurs
Les contrôleurs de moteur sont des dispositifs électroniques qui permettent de contrôler le mouvement des moteurs électriques. Ils sont couramment utilisés dans les domaines de la robotique, de l'automatisation industrielle et des véhicules électriques.
Roboteq : une technologie de pointe pour une performance optimale
Les contrôleurs de moteur Roboteq sont des contrôleurs de moteur très polyvalents et robustes. Ils offrent des fonctionnalités avancées telles que la régulation de la vitesse, la régulation de la position, la commande de couple, la régénération d'énergie et la surveillance des paramètres de performance. Les contrôleurs Roboteq sont également compatibles avec une large gamme de types de moteurs, y compris les moteurs à courant continu (DC), les moteurs à courant alternatif (AC) et les moteurs pas à pas.
Sabertooth : une solution économique pour les projets de robotique et d'automatisation
Les contrôleurs Sabertooth sont également des contrôleurs de moteur populaires et polyvalents. Ils sont conçus pour fonctionner avec des moteurs à courant continu (DC) et offrent une large gamme de fonctionnalités, notamment la régulation de la vitesse, la régulation de la direction et la protection contre les surtensions et les courts-circuits. Les contrôleurs Sabertooth sont également connus pour leur facilité d'utilisation et leur fiabilité, et sont largement utilisés dans les projets de robotique et d'automatisation.

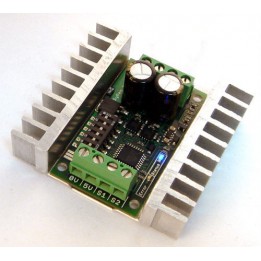








Testez la puissance du contrôleur de moteurs SyRen 50 : jusqu'à 100 ampères de puissance en pointe, 4 modes de pilotage de la vitesse ou de la direction, le tout parfaitement sécurisé.
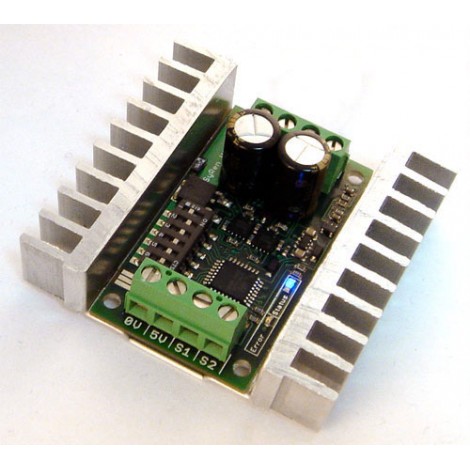
Le célèbre contrôleur de moteur régénératif SyRen revient en version 25 A : entièrement sécurisé et très polyvalent, il vous permet un contrôle étendu des mouvements de votre robot mobile.
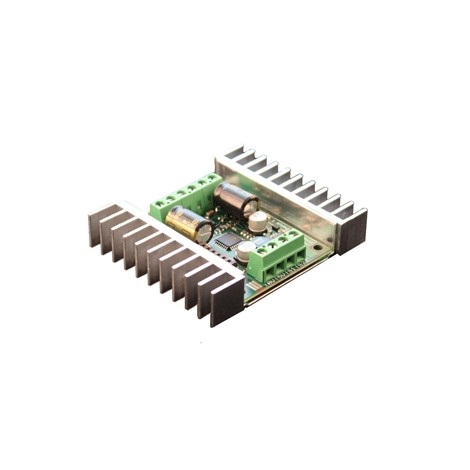
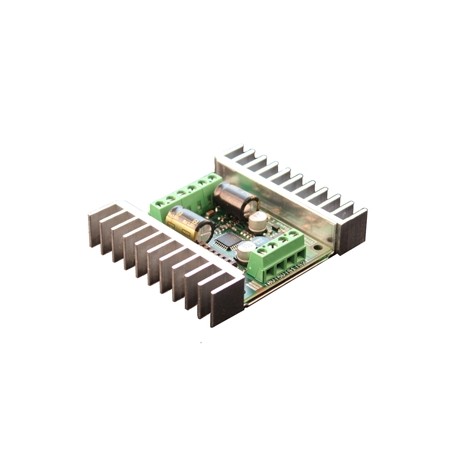
Placez entre les mains de votre Sabertooth le contrôle et l'alimentation de deux moteurs à courant continu, d'un microcontrôleur, de servos… votre robot va atteindre de nouveaux sommets en termes de manœuvrabilité, et d'autonomie !
Le contrôleur de moteurs Sabertooth 2x5 peut alimenter deux moteurs à balais en 5 ampères continus. La solution idéale pour vos petits robots !

Sabertooth revient avec son contrôleur de moteurs le plus ambitieux : 2 x 60 A pour piloter des robots jusqu'à 450 kg avec toute la subtilité nécessaire !

Finesse de navigation, autonomie accrue, modes de pilotage variés : le contrôleur de moteurs Syren fait partie des excellents drivers pour les robots de gabarit moyen.
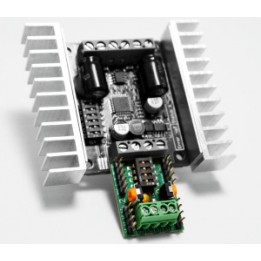
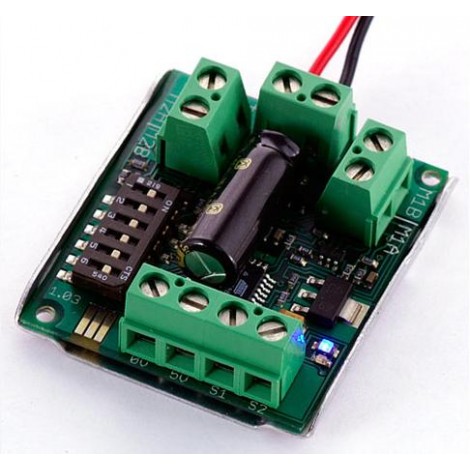
Si vous cherchez plus de liberté et de précision dans le contrôle de vos moteurs et servos, le contrôleur de mouvements Kangaroo de Dimension Engineering a toutes les qualités requises : compatible avec Sabertooth ou SyRen, il vous permet de prendre en main position et/ou vitesse sans sortie de route.

Sabertooth 2x32 offre un contrôleur de moteurs double canal de 32 A (64 A de crête par moteur), contrôlable via une entrée radiocommandée, série TTL, USB ou analogique. Régénératif, c'est un véritable booster pour votre robot !


En exclusivité chez Génération Robots, découvrez la carte Pixl, conçue pour piloter le moteur Dynamixel XL-320 de votre robot éducatif Poppy Ergo Jr et pour alimenter votre carte Raspberry Pi. Non compatible avec la Raspberry Pi 3B+.