Ressources du Robot humanoïde programmable NAO6
FAQ – Robot humanoïde NAO V6
À quoi sert le robot humanoïde NAO V6 ?
Le robot humanoïde NAO V6 est utilisé pour l’enseignement de la robotique, la recherche en intelligence artificielle et les projets d’interaction humain-robot. Il permet de développer des scénarios interactifs, des comportements autonomes et des applications pédagogiques.
Le robot NAO V6 est-il adapté à l’enseignement ?
Oui, NAO est largement utilisé dans les universités, écoles d’ingénieurs et établissements STEM. Il permet d’apprendre la programmation, la robotique et l’IA à travers des projets concrets et interactifs.
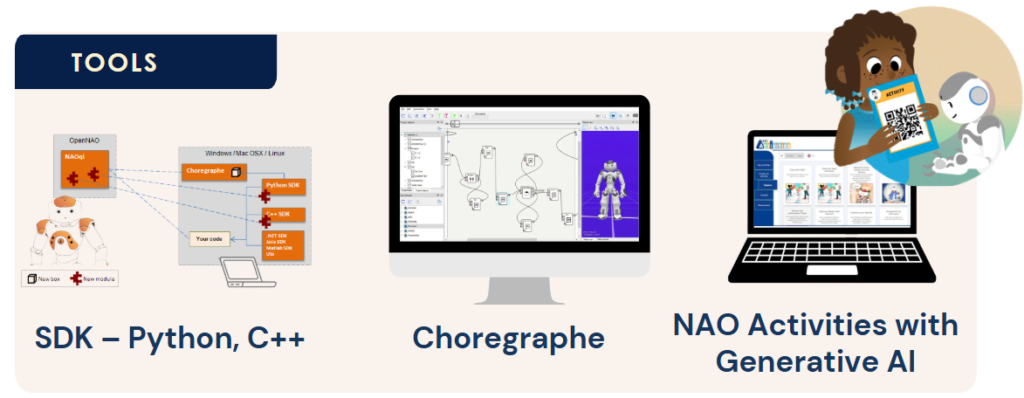
Comment programmer le robot NAO V6 ?
Le robot peut être programmé avec plusieurs outils :
- Choregraphe pour la programmation visuelle
- Python pour le développement rapide
- C++ pour des projets avancés
Il est également possible d’utiliser des scénarios prêts à l’emploi via NAO Activities.
Quels types de projets peut-on réaliser avec NAO ?
NAO permet de développer de nombreux projets :
- Interaction humain-robot
- Reconnaissance vocale et vision
- Démonstrations robotiques
- Projets pédagogiques
- Recherche en robotique sociale et IA
Le robot NAO V6 est-il autonome ?
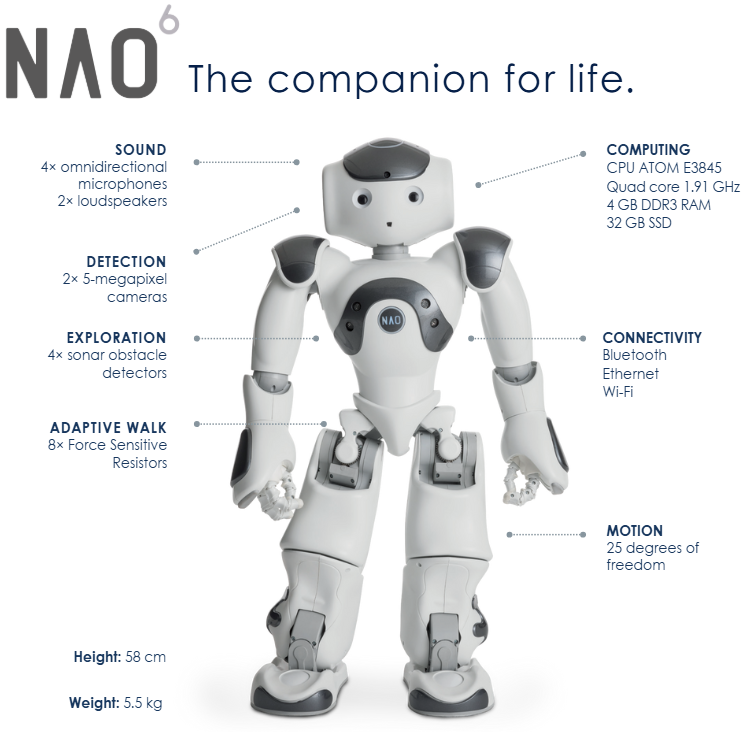
Oui, le NAO V6 est un robot autonome équipé de capteurs, de caméras et d’un système embarqué lui permettant de percevoir son environnement et d’interagir avec les utilisateurs sans contrôle constant.
Quelle est l’autonomie du robot NAO V6 ?
Le robot dispose d’une autonomie d’environ 60 à 90 minutes selon l’usage (interaction, déplacement, traitement).
Le robot NAO V6 est-il adapté à la recherche en IA ?
Oui, NAO est une plateforme largement utilisée pour la recherche en intelligence artificielle, robotique sociale et perception. Il permet de tester des algorithmes et des interactions dans des environnements réels.
Peut-on utiliser NAO pour des démonstrations ou de l’accueil ?
Oui, le robot NAO est souvent utilisé pour des démonstrations, événements, accueil de visiteurs ou médiation. Il peut parler, interagir et guider des utilisateurs dans différents contextes.
Le robot NAO V6 est-il facile à transporter ?
Oui, avec un poids de 5,6 kg et une taille de 58 cm, NAO est facilement transportable entre différentes salles ou sites.
Que comprend le kit NAO V6 ?
Le kit inclut :
- Le robot humanoïde NAO V6
- La suite logicielle (Choregraphe, SDK, outils)
- Une garantie de 2 ans