Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
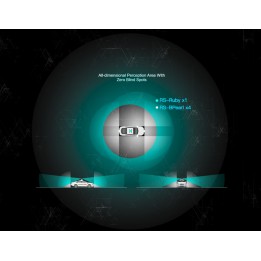
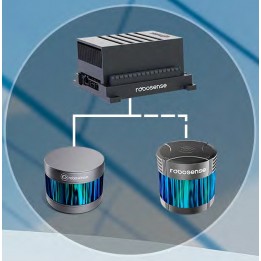
Le LiDAR RoboSense Fairy est un LiDAR numérique à portée intermédiaire destiné à la perception 3D en robotique mobile et en cartographie 3D.

Le LiDAR RoboSense Fairy est un LiDAR numérique à portée intermédiaire destiné à la perception 3D en robotique mobile et en cartographie 3D.