Tiefenkameras
Tiefenkameras: Was nützt das?
Tiefenkameras statten viele mobile Roboter (und selbstfahrende Autos) aus, die so ihre Umgebung viel genauer einschätzen. Sie können auch für Präzisions-Roboter-Greifoperationen (Medizin, fortgeschrittene Industrie) verwendet werden.
Sie sind in der Lage, sowohl im Innen- als auch im Außenbereich unter einer Vielzahl von Lichtverhältnissen zu arbeiten.
Einschränkungen der mobilen Robotik
Autonome mobile Roboter sind oft erforderlich, um sich in dynamischen Umgebungen (Geschäfte, Krankenhäuser, Flughäfen usw.) zu bewegen. Der Roboter muss in der Lage sein, entsprechend der Dichte der Menge zu verlangsamen, im letzten Moment in Gegenwart eines Hindernisses anzuhalten und eine zugängliche Route autonom wieder zu öffnen.
Eine dynamische Umgebung impliziert auch das Vorhandensein von Objekten, die den Ort wechseln können (Baustellen, Industriestandorte usw.). Mobile Roboter müssen daher eine große Anpassung (in Echtzeit) und eine beispiellose Präzision aufweisen.
Sich die Zeit zu nehmen, die Sensoren, die auf Ihrer mobilen Basis montiert werden, richtig auszuwählen, ist daher ein entscheidender Faktor in jedem Robotik-Projekt.
Die 3 Hauptsensoren für die robotische Bildverarbeitung
Für das Sehen werden häufig folgende Sensoren gewählt:
- Tiefenkameras
- LiDAR
- Ultraschall-Näherungssensoren
Diese Sensoren sind komplementär und bieten dem Roboter eine ultrapräzise Fähigkeit, seine Umgebung wahrzunehmen.
Tiefenkameras
Sie stellen so getreu wie möglich dar, was wir mit unseren Augen sehen: Sie unterscheiden Formen, Farben, Bewegungen. Sie haben eine Weitwinkelsicht.
Stereo-Bilderkennungstechnologie verwendet zwei Kameras, um die Tiefe des Bildes zu berechnen (möglich dank der Fusion der beiden Bilder).
Diese Kameras neigen dazu, falsche Positive oder Phantompositionen zu haben, so dass sie mit anderen Sensoren wie LiDAR- oder Ultraschallsensoren ergänzt werden.
LiDAR
Ein LiDAR ermöglicht es, den Abstand zwischen dem Roboter und Hindernissen zu messen. Er wird in der Lage sein, eine Echtzeit-3D-Karte seiner Umgebung in einer Punktwolke nachzubilden. Sehr genau und schnell, es erkennt aber keine Glasoberflächen oder Spiegel.
Ultraschall-Näherungssensoren
Ultraschall ermöglicht es, Glasscheiben und Spiegeloberflächen zu erkennen, die LiDAR nicht wahrnimmt.
Génération Robots, Distributor von Intel RealSense und Stereolabs Kameras
Stereolabs Kameras: sehr gute Leistung
ZED-Kameras sind passive Tiefensensoren. Das bedeutet, dass sie kein Laser- oder IR-Licht wie aktive Sensoren emittieren.
Mehrere passive Sensoren können gleichzeitig ohne Störungen verwendet werden und werden nichtdurch Sonnenlicht beeinflusst.
ZED-Stereokameras haben eine hohe Auflösung und Bildrate im Vergleich zu aktiven Sensoren. Ebenso ist ihr Tiefenbereich länger als bei aktiven Sensoren.
Intel RealSense Kameras : Gute Leistung + GPU
Bei guter Leistung besteht der große Vorteil von Intel Realsense-Kameras darin, dass sie mit einer Grafikkarte ausgestattet sind. Es ist daher nicht notwendig, einen Computer mit einer GPU zu verwenden, damit es funktioniert.
Ein NUC oder sogar ein Raspberry Pi kann den Trick machen, was dazu beitragen kann, die Kosten für die für Ihr Projekt benötigte Hardware zu senken.
Luxonis-Kameras: Robotik für jeden zugänglich.
Luxonis-Kameras sind schlüsselfertige Produkte mit der Möglichkeit, ein erstes Skript in weniger als 30 Sekunden auszuführen. Sie integrieren KI, Computer Vision und Bildverarbeitung direkt in die Kamera. Alle Kameras basieren auf Depth AI, einem Open-Source-Softwarepaket.
Die Marke vermarktet zahlreiche Modelle mit der Möglichkeit, zwischen der Basisversion und der PoE-Version zu wählen. Die PoE-Option ist eine robustere Version mit einem wasserdichten Gehäuse, die auch im Freien oder in raueren Umgebungen eingesetzt werden kann.














































Die RealSense D436 ist eine Stereo-Tiefenkamera für Projekte in den Bereichen Robotik, Embedded Vision, autonome Navigation und 3D-Wahrnehmung.

Die ZED X Nano Stereo Camera von Stereolabs ist eine kurzreichweitige Tiefen-Stereokamera, die für robotische Manipulation, Humanoide und Physical AI-Projekte entwickelt wurde.

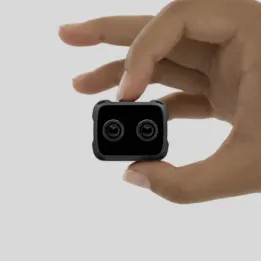
Die RoboSense AC2 ist eine Tiefenkamera für die robotische Wahrnehmung. Sie kombiniert einen Solid-State-dToF-LiDAR, Stereo-RGB-Kameras und eine IMU für robotische Manipulation, 3D-Modellierung und Lokalisierung.


Eine Stereo-3D-Kamera über Ethernet mit Vision SoC V5, integrierter IMU und IP65-Gehäuse, entwickelt für anspruchsvolle industrielle Bildverarbeitungs- und Robotikanwendungen.


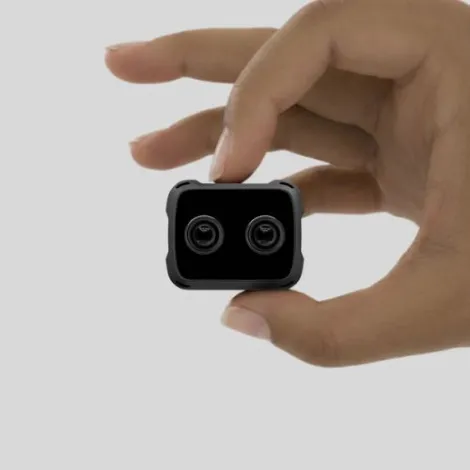
Eine kompakte Stereokamera mit USB-C-Stromversorgung, IR-Pass-Filter, IMU und Infrarotprojektor – ideal, um Ihren Prototypen und mobilen Robotern einfach Tiefenwahrnehmung hinzuzufügen.


Eine Langstrecken-Stereokamera mit IR-Pass-Filter für zuverlässige 3D-Sicht in anspruchsvollen Umgebungen, sowohl im Innen- als auch im Außenbereich.


Leistungsstarkes GMSL2 Fakra-Kabel (M-F), bis zu 10m, für zuverlässige Videoübertragung unter anspruchsvollen Bedingungen.


Ideal für enge Räume: Dieses gewinkelte GMSL2 Fakra-Kabel optimiert die Integration Ihrer ZED X-Kamera und gewährleistet eine zuverlässige Hochfrequenz-Videodatenübertragung.


Dieses GMSL2 Fakra-Kabel (Buchse-Buchse) gewährleistet eine zuverlässige und langlebige Videoübertragung, selbst unter anspruchsvollen Bedingungen. Es ist kompatibel mit ZED X-Kameras.


Verbinden Sie zwei ZED X-Kameras ganz einfach mit Ihrer ZED Box – mit diesem GMSL2 1-zu-4 Fakra-Kabel, das für hohe Bildfrequenzen ausgelegt ist.


Erfassen Sie bis zu 8 ZED X Kameras gleichzeitig mit präziser Hardware-Synchronisation und hoher Bandbreite dank der ZED Link Mono, Duo und Quad Karten.


Die ZED X One ist eine Hochleistungs-Tiefenkamera, entwickelt für die 3D-Erfassung auf große Entfernungen, Teleoperation und intelligente Analyse, mit Multikamera-Synchronisation und integriertem IMU-Sensor.


Diese robuste Aluminiumhalterung ermöglicht die Befestigung von zwei ZED X One Kameras auf einem Stativ und erlaubt eine flexible Einstellung des Abstands zwischen ihnen. Ideal für präzise Tiefenerfassung von 5 cm bis 100 Meter.


Die ZED X Kamera von Stereolabs ist eine hochpräzise industrielle Stereo-Vision-Lösung, ideal für autonome Robotik, digitale Zwillinge und fortgeschrittene Forschungsanwendungen.


Die RealSense™ Depth Camera D456 basiert auf der Technologie unserer USB-Kamera D455 und bietet dank ihrer 3 Sensoren eine größere Reichweite.
.
Die D457 Kamera ist die erste hochbandbreitige Stereo-Kamera mit GMSL/FAKRA Schnittstelle von Intel® RealSense. Sie ist in einem IP65-zertifizierten Gehäuse untergebracht, das effektiven Schutz vor Staub und Wasser bietet.


Sie brauchen eine leistungsfähige Kamera mit einem großen Sichtfeld? Die OAK-D W bietet diese zwei Optionen und erweist sich bei zahlreichen Projekten als sehr effizient.


Die Tiefenkamera RealSense™ bietet ein stereoskopisches Kameramodul für Aufnahmen mit geringer Reichweite von Farbbildern in Innenräumen sowie im Freien.


Nach der ZED 2 hat die ZED 2i Tiefenkamera ein neues Design, eine sichere Konnektivität sowie brandneue Objektivoptionen. Die ZED 2i von Stereolabs bietet ein extrem leistungsfähiges Tool für Ihre Projekte mit der Robotersicht. == 4,0mm Linse auf Anfrage


In der von RealSense entwickelten Familie von Tiefenkameras richtet sich die D415 an Entwickler, die eine hohe Wahrnehmungspräzision selbst auf mehrere Meter Entfernung benötigen.


Seit 10 Jahren entwickelt RealSense Modelle der Baureihe D400. Nun ist es dem Anbieter gelungen, eine der besten auf dem Markt erhältlichen Tiefenkameras herauszubringen. Die 3D-Kamera D455 von RealSense besitzt eine Reichweite von 10 m, und das mit extrem hoher Tiefen- und Farbpräzision.

Diese Alternative zur D435 fügt ihrem Funktionsumfang eine Bildstabilisierung hinzu. Dafür sorgt die eingebaute Inertialeinheit mit 6 DOF.


Die RealSense D435 ist eine Tiefenkamera mit großem Sichtfeld und einer maximalen Reichweite von 10 m. Sie eignet sich besonders für schwach beleuchtete Einsatzorte.


Die ZED Mini eignet sich ideal für Entwickler, Forscher und Unternehmen, die immersive Erlebnisse schaffen oder 3D-Wahrnehmung in ihre Robotiklösungen integrieren möchten.