")
")
")
")
")
Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Il robot mobile LIMO di Agilex offre una struttura evolutiva e un supporto 100% ROS dedicato allo sviluppo dell’intelligenza artificiale e delle applicazioni di navigazione autonoma. Questo robot mobile open-source è completamente programmabile tramite risorse libere e risulta perfetto per gli studenti (in ingegneria robotica, automazione, ecc.) o per il mondo della ricerca. Inoltre, la sua compatibilità con Google Assistant gli conferisce varie possibilità come robot di servizio o d'accoglienza.
È composto da una piattaforma mobile AgileX con ruote intercambiabili. Può passare dalla guida con cingoli a una guida con 4 ruote omnidirezionali, a trazione differenziale o a guida Ackermann.
Il robot mobile LIMO è compatibile con ROS (1 e 2) e con il simulatore Gazebo. Hai così accesso a un’ampia lista di demo e esempi di programmi open-source per sviluppare la tua intelligenza artificiale.
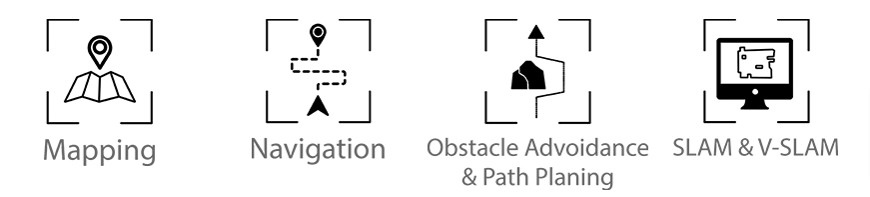
LIMO consente numerose possibilità nel campo della navigazione autonoma:
Grazie alla telecamera e al LiDAR integrati, oltre a una solida IMU, il tuo robot LIMO esplora, rileva, sorveglia e analizza l’ambiente proprio come una sentinella. Ideale per applicazioni di sorveglianza e sicurezza, ma anche per creare un UGV autonomo capace di mappare tutti gli spazi attraversati.
La piattaforma robotica LIMO è disponibile in 2 versioni: una versione standard e una versione pro (compatibile con ROS 2).
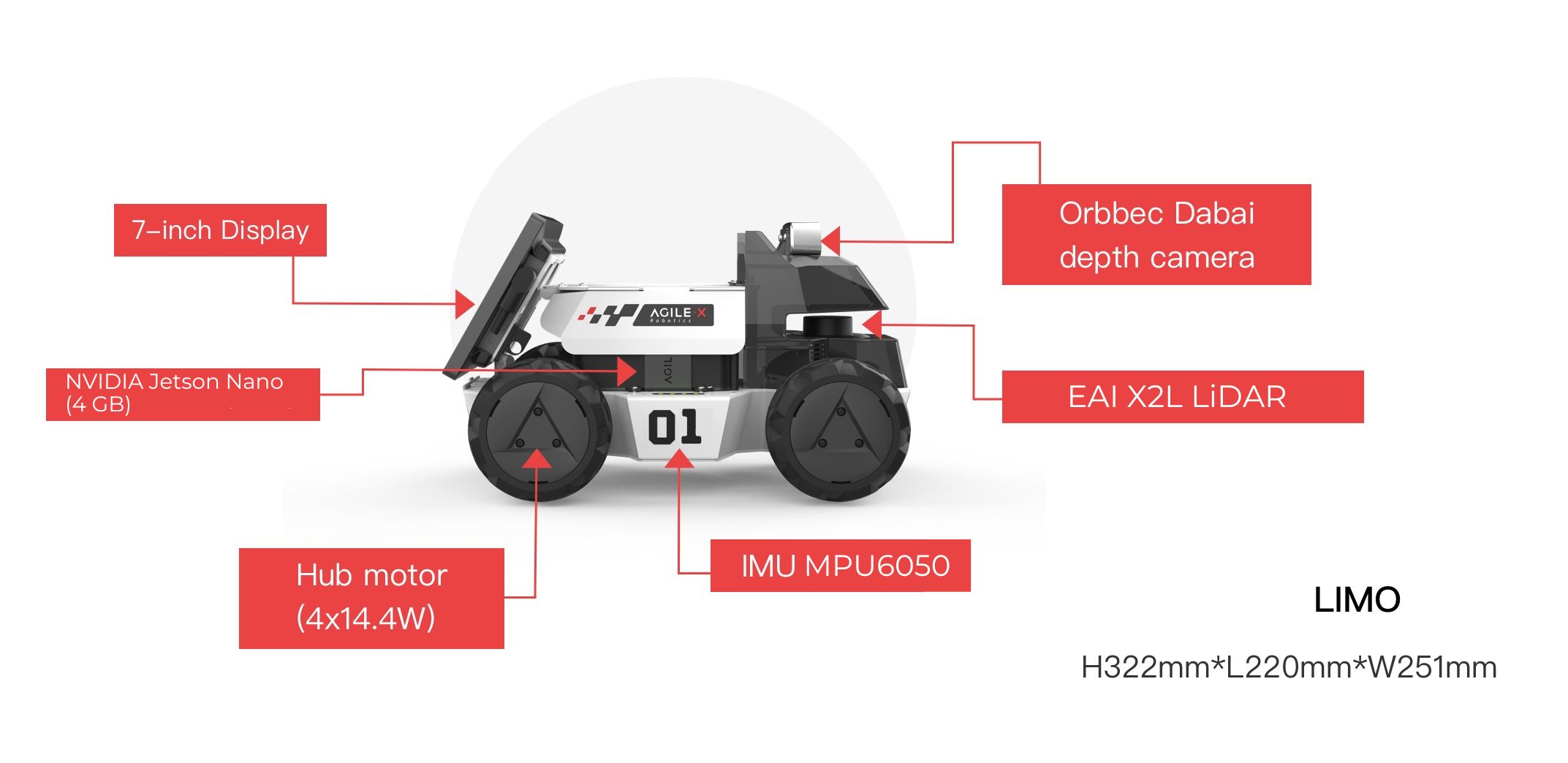
Il robot mobile LIMO, nella sua versione base, comprende una Nvidia Jetson Nano, un LiDAR EAI X2L e una telecamera di profondità Orbbec DaBai.
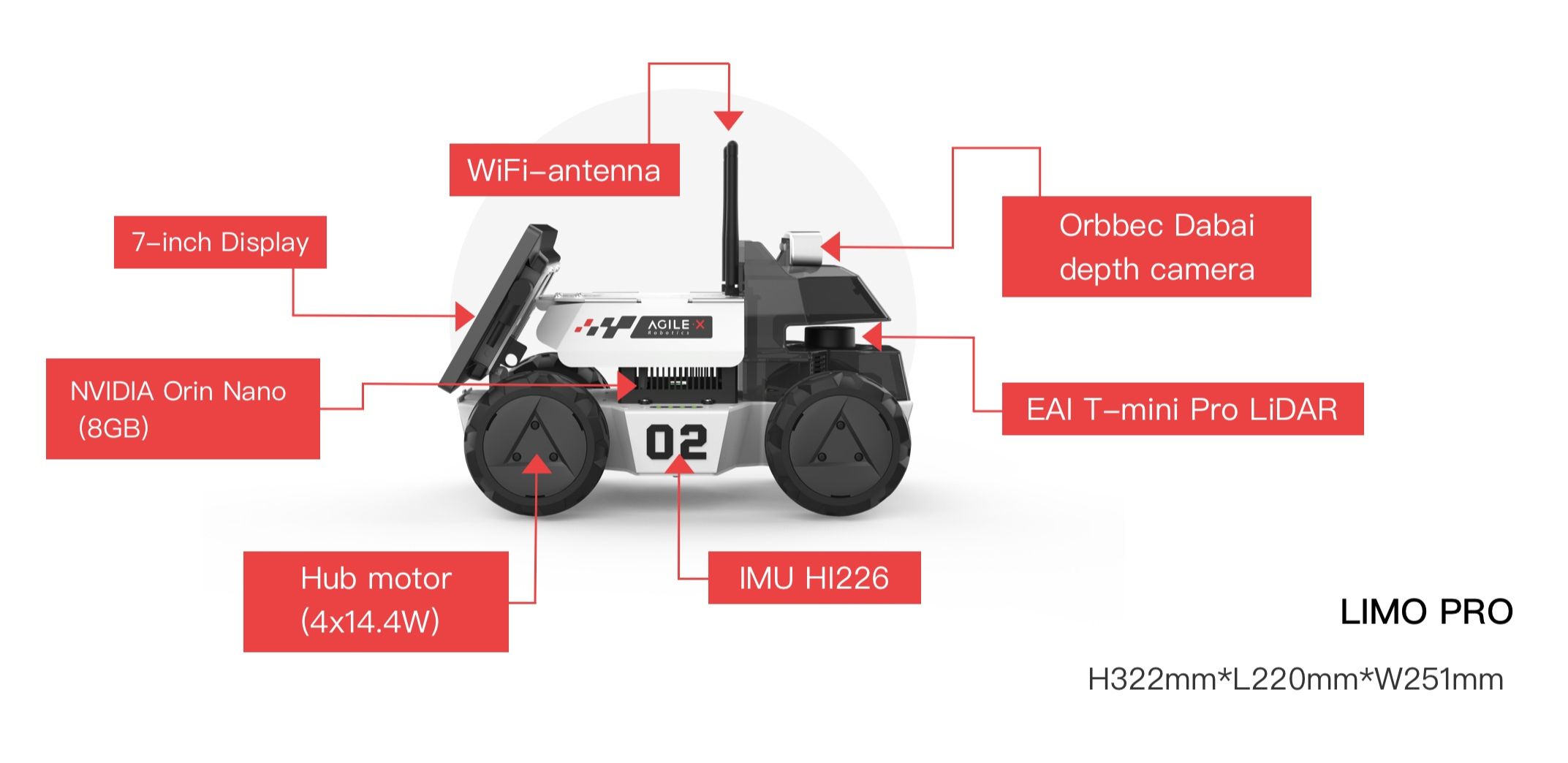
Il robot mobile LIMO PRO integra NVIDIA Orin Nano, un LiDAR EAI T-mini Pro e una telecamera di profondità Orbbec DaBai. Questi sensori garantiscono una percezione affidabile dell’ambiente. È ideale per sviluppare applicazioni di navigazione autonoma, evitamento ostacoli e riconoscimento visivo.
LIMO PRO è perfetto per studenti e ricercatori. I numerosi sensori e i software avanzati facilitano l’apprendimento immersivo.
LIMO PRO è compatibile con ROS 1 Noetic e ROS 2 Foxy per un’integrazione software flessibile. L’autonomia della batteria raggiunge fino a 2,5 ore di utilizzo continuo.
| LIMO | LIMO PRO | |
| Dimensioni | 322×220×251mm | 322×220×251mm |
| Peso | 4,8kg | 4,8kg |
| Carico utile | 4kg | 4kg |
| Altezza da terra | 24mm | 24mm |
| Struttura di guida | 40 N·m | 40 N·m |
| Schermo | 7 pollici | 7 pollici |
| Computer | Jetson Nano | Orin Nano |
| Telecamera di profondità | Orbbec DaBai | Orbbec DaBai |
| LiDAR | EAI X2L | EAI T-mini Pro |
| Batteria | 5.2Ah 12V | 10Ah 12V |
| Autonomia | 1 ora | 2,5 ore |
| Autonomia in standby | 2 ore | 4 ore |
| Sistema operativo | Ubuntu 18.04 | Ubuntu 20.04 |
| Versione ROS | ROS1 Melodic | ROS1 Noetic / ROS2 Foxy |
| Metodo di controllo | App mobile / telecomando | App mobile / telecomando |
| Portata di controllo app | 10m | 10m |
| LIMO | LIMO PRO | |
| Dimensioni | 322×220×251mm | 322×220×251mm |
| Peso | 4,8kg | 4,8kg |
| Carico utile | 4kg | 4kg |
| Altezza da terra | 24mm | 24mm |
| Interasse | 200 mm | 200 mm |
| Carreggiata | 175 mm | 175 mm |
| Tipo di motore | Motore a mozzo (4x14.4W) | Motore a mozzo (4x14.4W) |
| Velocità massima | 1 m/s | 1 m/s |
| Raggio minimo di sterzata (Ackermann) | 0,4 m | 0,4 m |
| Temperatura di esercizio | -10°C ~ +40°C | -10°C ~ +40°C |
| Altezza massima ostacolo | 40° | 40° |
| Interfaccia di alimentazione | DC (5.5×2.1mm) | DC (5.5×2.1mm) |
| Sistema operativo | Ubuntu 18.04 | Ubuntu 20.04 |
| IMU | MPU6050 | HI22 |
| CPU | - | 6 Core ARM Cortex-A78AE |
| GPU | - | 1024-core CUDA |
| Batteria | 5.2Ah 12V | 10Ah 12V |
| Autonomia | 1 ora | 2,5 ore |
| Autonomia in standby | 2 ore | 4 ore |
| Comunicazione | Wi-Fi, Bluetooth | Wi-Fi, Bluetooth |
| LiDAR | EAI X2L | EAI T-mini Pro |
| Telecamera di profondità | Orbbec DaBai | Orbbec DaBai |
| Computer | Jetson Nano 4G | Jetson Orin Nano 8G |
| Porte USB | TYPE-C x1, USB2.0 x2 | TYPE-C x1, USB2.0 x2 |
| Schermo | 7 pollici | 7 pollici |
| Versione ROS | ROS1 Melodic | ROS1 Noetic / ROS2 Foxy |
| Metodo di controllo | App mobile / telecomando | App mobile / telecomando |
| Portata controllo app | 10m | 10m |
")