Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
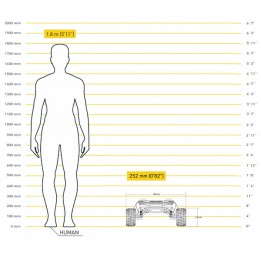
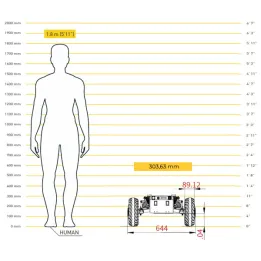
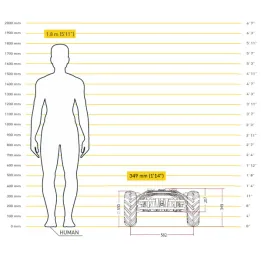
Questo pacchetto chiavi in mano combina l’UGV AgileX Ranger Mini 3.0 e il Kit R&D ROS 2 del GR Lab per iniziare senza alcuna integrazione. Passate direttamente allo sviluppo.










Questo pacchetto chiavi in mano combina l’UGV AgileX Ranger Mini 3.0 e il Kit R&D ROS 2 del GR Lab per iniziare senza alcuna integrazione. Passate direttamente allo sviluppo.