")
")
")
")
")
Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Discover LIMO, a robot based on an Agilex mobile platform. This evolutionary robotic structure is dedicated to the development of artificial intelligence. LIMO is available in 2 versions: LIMO and LIMO PRO (ROS 2 compatible).
The LIMO mobile robot is compatible with ROS (1 and 2) and the Gazebo simulator. This provides access to a wide range of open-access demos and sample programs for the development of your artificial intelligence.
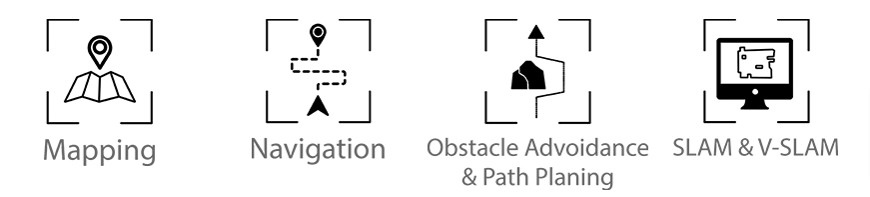
LIMO allows you to explore various possibilities in terms of autonomous navigation:
With its built-in camera, LiDAR, and robust inertial unit, your LIMO mobile robot explores, detects, monitors, and analyzes its environment like a true sentinel. Ideal for security and surveillance applications and for creating an autonomous UGV capable of mapping all the places it traverses.
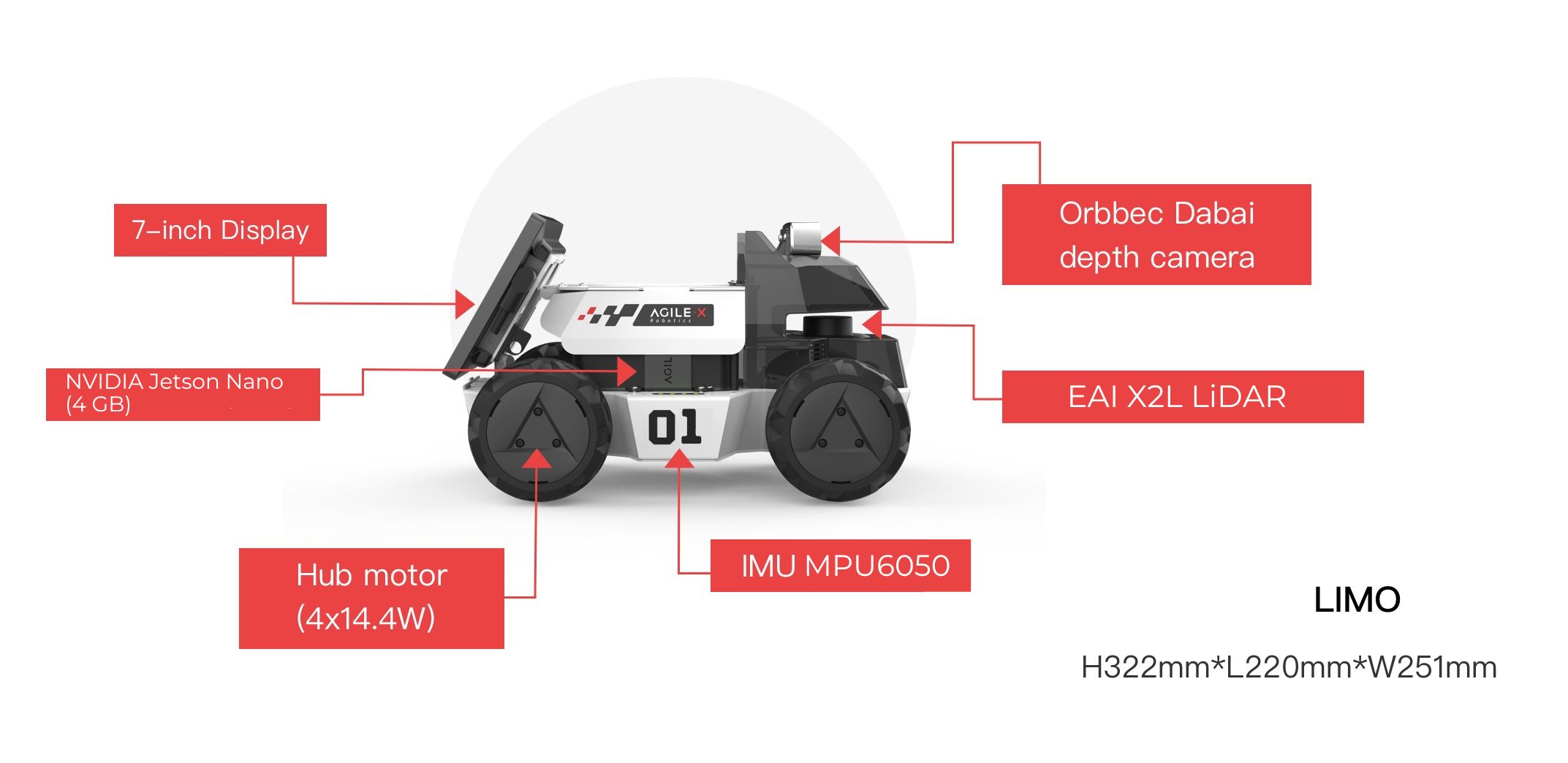
The LIMO robotic platform comes in 2 versions: a standard and pro.
The basic version of the LIMO mobile robot includes an Nvidia Jetson Nano, an EAI X2L LiDAR, and an Orbbec DaBai depth camera.
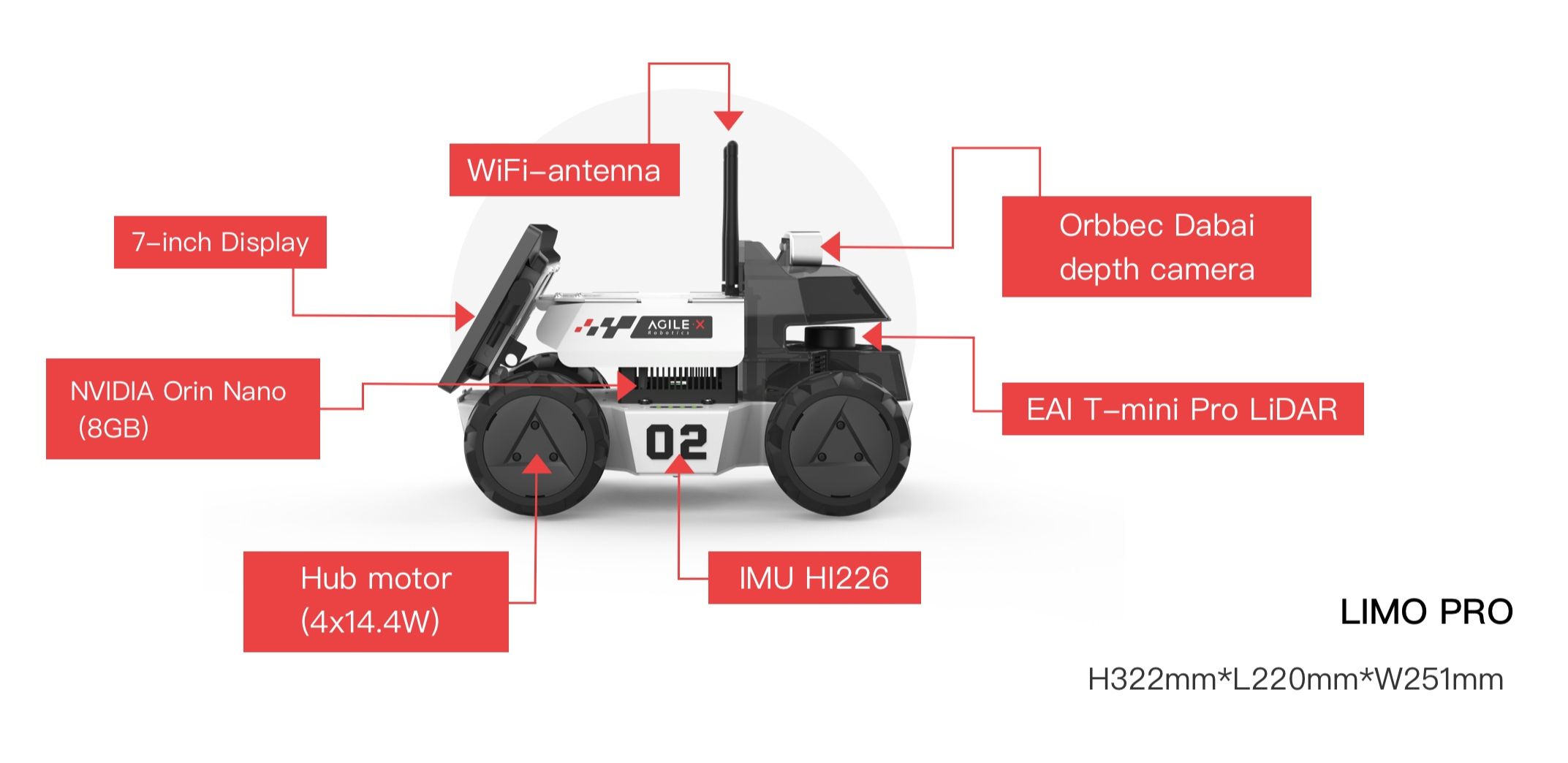
The LIMO PRO mobile robot integrates the NVIDIA Orin Nano, an EAI T-mini Pro LiDAR, and the Orbbec Dabai depth camera. These various sensors give the robot a robust perception of its environment. It is ideal for developing applications for autonomous navigation, obstacle avoidance, and visual recognition.
LIMO PRO is an ideal robotic platform for students and researchers. Its numerous sensors and advanced software facilitate immersive learning.
LIMO PRO is compatible with ROS 1 Noetic and ROS 2 Foxy for flexible software integration. Its battery provides up to 2.5 hours of continuous use.
| LIMO | LIMO PRO | |
| Dimensions | 322*220*251mm | 322*220*251mm |
| Weight | 4.8kg | 4.8kg |
| Payload | 4kg | 4kg |
| Ground clearance | 24mm | 24mm |
| Steering Structure | 40 N·m | 40 N·m |
| Display | 7-inch | 7-inch |
| IPC | Jeston Nano | Orin Nano |
| Depth Camera | Orbbec DaBai | Orbbec DaBai |
| LiDAR | EAI X2L | EAI T-mini Pro |
| Battery | 5.2Ah 12V | 10Ah 12V |
| Working Time | 1H | 2.5H |
| Standby Time | 2H | 4H |
| Operating System | Ubuntu 18.04 | Ubunutu 20.04 |
| ROS Version | ROS1 Melodic | ROS1 Noetic/ROS2 Foxy |
| Control Method | Mobile App/Command Control | Mobile App/Command Control |
| App Control Range | 10m | 10m |
| LIMO | LIMO PRO | |
| Overall Dimensions | 322*220*251mm | 322*220*251mm |
| Weight | 4.8kg | 4.8kg |
| Payload | 4kg | 4kg |
| Minimum ground clearance | 24mm | 24mm |
| Wheel base | 200 mm | 200 mm |
| Tread | 175 mm | 175 mm |
| Drive type | Hub motor (4x14.4W) | Hub motor (4x14.4W) |
| No load max speed | 1 m/s | 1 m/s |
| Ackermann minimum turning radius | 0,4 m | 0,4 m |
| Work environment | -10°C ~ +40°C | -10°C ~ +40°C |
| Max. climbing capacity | 40° | 40° |
| Power interface | DC (5.5x2.1mm) | DC (5.5x2.1mm) |
| Operating System | Ubuntu 18.04 | Ubunutu 20.04 |
| IMU | MPU6050 | HI22 |
| CPU | - | 6 Core Arm@ Cortex@-A78AE |
| GPU | - | 1024-core CUDA |
| Battery | 5.2Ah 12V | 10Ah 12V |
| Working time | 1H | 2.5H |
| Stand-by time | 2H | 4H |
| Communication interface | Wifi, Bluetooth | Wifi, Bluetooth |
| LiDAR | EAI X2L | EAI T-mini Pro |
| Depth camera | Orbbec DaBai | Orbbec DaBai |
| IPC | Jeston Nano 4G | Jetson Orin Nano 8G |
| USB-HUB | TYPE-C x1,USB2.0 x2 | TYPE-C x1,USB2.0 x2 |
| Display | 7 inch touch screen | 7 inch touch screen |
| ROS Version | ROS1 Melodic | ROS1 Noetic/ROS2 Foxy |
| Control mode | Mobile APP,command control | Mobile APP,command control |
| Mobile APP | Bluetooth,maximum distance 10m | Bluetooth,maximum distance 10m |
")
Discover LIMO, a robot based on an Agilex mobile platform. This evolutionary robotic structure is dedicated to the development of artificial intelligence. LIMO is available in 2 versions: LIMO and LIMO PRO (ROS 2 compatible).