Mobile Roboter
Die mobile Robotik bietet in ihren Anwendungen einen echten Mehrwert. Mobile Roboter sind hochentwickelte Werkzeuge, deren Autonomie Menschen bei anstrengenden oder gefährlichen Aufgaben entlasten kann.
Was ist ein autonomer mobiler Roboter?
Ein autonomer mobiler Roboter ist ein Roboter, der sich an einem offenen oder geschlossenen Ort bewegen kann. Er bleibt nicht an einer bestimmten Position fixiert. Der autonome mobile Roboter kann seine Umgebung kartografieren und so frei navigieren, ohne von einem Bediener gesteuert zu werden.
Autonome mobile Roboter benötigen keine externen Relais (wie z. B. Beacons), um zu navigieren. Stattdessen verwenden sie die SLAM-Technologie (Simultaneous Localization And Mapping), die es ihnen ermöglicht, in Echtzeit eine Karte ihrer Umgebung zu erstellen, diese zu verbessern und sich darin zu lokalisieren. Wenn es ihre Aufgabe zulässt, können die autonomen mobilen Roboter auch teleoperiert werden.
In den meisten Fällen besteht ein autonomer mobiler Roboter aus :
- Einem Chassis (mit Motoren und Controller)
- Von einem Bordcomputer
- Von einer Batterie
- Von Sensoren (mindestens ein LiDAR)
- Von Aktuatoren
Die Sensoren und Aktoren, mit denen eine mobile Basis ausgestattet ist, hängen von den Missionen ab, die sie ausführen soll.
Beispiele für Sensoren :
- Thermischer Detektor
- Panorama-Kamera
- Gaswarngerät
- Bewegungsmelder
- Mikrofon
- Etc
Beispiele für Aktuatoren :
- Roboterarm
- Bildschirm
- Lautsprecher
- Drohne
- Etc
Mobile Roboter: Aufgaben und Anwendungen
In welchen Situationen kann die mobile Robotik einen echten Mehrwert darstellen? Es würde zu weit führen, all die Fälle aufzulisten, in denen mobile Basen eine enorme Zeitersparnis bringen oder die Risiken oder Ermüdung für Menschen verringern können. Ganz zu schweigen von den Situationen, in denen sich der mobile Roboter als unverzichtbar erweisen kann. Zum Beispiel sind für Inspektionsaufgaben in gefährlichen Umgebungen mobile Roboter unerlässlich, um Sicherheit und Effizienz zu gewährleisten.
Nachfolgend einige Anwendungsbeispiele:
- Nuklearer Rückbau
- Weltraumforschung (Rover, Sammeln von Proben, etc.)
- Transport von schwerer Ausrüstung (Baustellen, Rettungsmissionen, wissenschaftliche Missionen usw.)
- Beförderung von Post, Medikamenten und leichter Ausrüstung innerhalb eines einzelnen Gebäudes, eines Gebäudekomplexes oder eines Stadtviertels
- Automatisierung der Reinigung in der Tierhaltung
- Die Überwachung und vorbeugende Wartung sensibler Anlagen (SEVESO-Standorte, Flughäfen, Öl & Gas)
- Etc
Wie wählt man den richtigen mobilen Roboter für sein Projekt aus?
Die Umgebung, in der sich der Roboter bewegen soll, ist ein sehr wichtiger Faktor, da diese Umgebung nicht verändert werden kann; dies ist eine der größten Einschränkungen.
Je nach Umgebung und Gelände, auf dem sich der Roboter bewegt, und je nach seinen Aufgaben wird die Fortbewegung unterschiedlich sein:
- Mechanum-Räder ➡ ermöglicht seitliche Bewegungen, geeignet für Lagerhäuser und Indoor-Navigation (Typ Roboter Dingo von Clearpath Robotics)
- Geländeräder ➡ für die Outdoor-Navigation, geeignet für Erkundungsmissionen, Landwirtschaft usw. (Typ Roboter RR100 von Generation Robots)
- Raupen ➡ Navigation im Freien, auf unebenem Gelände (Schlaglöcher, kleine Gräben, Felsen, Stufen, etc.) (Typ Bunker Pro Roboter)
- 4 Beine ➡ ermöglicht es Robotern, sich auf Treppen oder Steinen zu bewegen ( Robotertyp Spot). Einige Hybridmodelle, wie der B2 von Unitree Robotics, haben Räder an den Enden ihrer Beine.
Ebenfalls zu berücksichtigen sind:
- Die Nutzlast (Wird der Roboter schwere Ausrüstung transportieren müssen?)
- Selbstständigkeit (ein wichtiger Faktor bei Überwachungs- und Sicherheitsmissionen)
- Agilität (Geschwindigkeit und Wenderadius)
- Das dem Projekt zugewiesene Budget
Auch andere Faktoren, wie die einfache Hinzufügung externer Geräte, können von Bedeutung sein. So sind die mobilen Roboter von Agilex mit Schienen ausgestattet, die eine schnelle individuelle Anpassung ermöglichen.
Schließlich ist die Kompatibilität mit ROS oder ROS 2 oft ein entscheidender Faktor bei der Auswahl einer mobilen Basis, insbesondere für Forschung und F&E-Zentren. Alle unsere mobilen Roboter sind ROS-kompatibel.










Eine Batterie, die mit den Robotern Turtlebot 3 und Robotis OP kompatibel ist, einschließlich Schutzsystem.

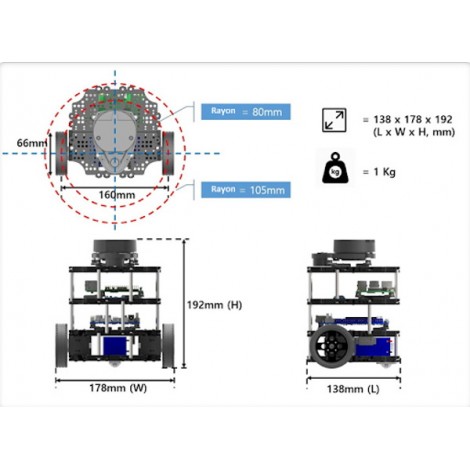
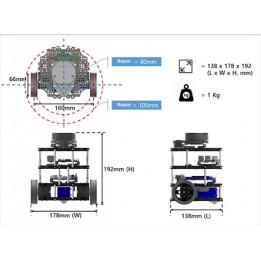
Die mobile Lernplattform Turtlebot 3 Burger ist eine leichte, kompakte, wirtschaftliche und nach Belieben personalisierbare mobile Roboterplattform. Sie stellt eine perfekte Lösung für all jene dar, die eine unterhaltsame Lösung für ihre Roboterprogrammierungs-Workshops suchen, aber auch für angehende Roboterbastler, Entwickler und Designer.

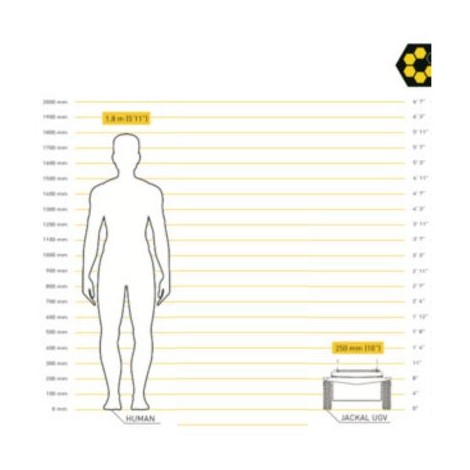
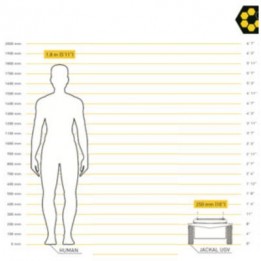
Sie möchten einen mobilen Hardcore-Roboter kennenlernen, der auf Feldwegen ebenso schnell vorankommt wie auf dem Linoleumboden in der Küche? Dann ist das unbemannte Landfahrzeug Jackal genau das Richtige für Sie, eine kompakte mobile Roboterplattform, die schnell und wendig ist und allerhand aushält!


Der Roboter Ridgeback ist eine omnidirektional verfahrbare Roboterplattform für den Einsatz in Innenräumen. Der komplett integrierte Roboter ist mit Laserscannern vorne und hinten ausgestattet und besitzt außerdem eine Inertialeinheit. Der Roboter Ridgeback bietet eine native Integration in ROS und Gazebo.