Mobile Roboter
Die mobile Robotik bietet in ihren Anwendungen einen echten Mehrwert. Mobile Roboter sind hochentwickelte Werkzeuge, deren Autonomie Menschen bei anstrengenden oder gefährlichen Aufgaben entlasten kann.
Was ist ein autonomer mobiler Roboter?
Ein autonomer mobiler Roboter ist ein Roboter, der sich an einem offenen oder geschlossenen Ort bewegen kann. Er bleibt nicht an einer bestimmten Position fixiert. Der autonome mobile Roboter kann seine Umgebung kartografieren und so frei navigieren, ohne von einem Bediener gesteuert zu werden.
Autonome mobile Roboter benötigen keine externen Relais (wie z. B. Beacons), um zu navigieren. Stattdessen verwenden sie die SLAM-Technologie (Simultaneous Localization And Mapping), die es ihnen ermöglicht, in Echtzeit eine Karte ihrer Umgebung zu erstellen, diese zu verbessern und sich darin zu lokalisieren. Wenn es ihre Aufgabe zulässt, können die autonomen mobilen Roboter auch teleoperiert werden.
In den meisten Fällen besteht ein autonomer mobiler Roboter aus :
- Einem Chassis (mit Motoren und Controller)
- Von einem Bordcomputer
- Von einer Batterie
- Von Sensoren (mindestens ein LiDAR)
- Von Aktuatoren
Die Sensoren und Aktoren, mit denen eine mobile Basis ausgestattet ist, hängen von den Missionen ab, die sie ausführen soll.
Beispiele für Sensoren :
- Thermischer Detektor
- Panorama-Kamera
- Gaswarngerät
- Bewegungsmelder
- Mikrofon
- Etc
Beispiele für Aktuatoren :
- Roboterarm
- Bildschirm
- Lautsprecher
- Drohne
- Etc
Mobile Roboter: Aufgaben und Anwendungen
In welchen Situationen kann die mobile Robotik einen echten Mehrwert darstellen? Es würde zu weit führen, all die Fälle aufzulisten, in denen mobile Basen eine enorme Zeitersparnis bringen oder die Risiken oder Ermüdung für Menschen verringern können. Ganz zu schweigen von den Situationen, in denen sich der mobile Roboter als unverzichtbar erweisen kann. Zum Beispiel sind für Inspektionsaufgaben in gefährlichen Umgebungen mobile Roboter unerlässlich, um Sicherheit und Effizienz zu gewährleisten.
Nachfolgend einige Anwendungsbeispiele:
- Nuklearer Rückbau
- Weltraumforschung (Rover, Sammeln von Proben, etc.)
- Transport von schwerer Ausrüstung (Baustellen, Rettungsmissionen, wissenschaftliche Missionen usw.)
- Beförderung von Post, Medikamenten und leichter Ausrüstung innerhalb eines einzelnen Gebäudes, eines Gebäudekomplexes oder eines Stadtviertels
- Automatisierung der Reinigung in der Tierhaltung
- Die Überwachung und vorbeugende Wartung sensibler Anlagen (SEVESO-Standorte, Flughäfen, Öl & Gas)
- Etc
Wie wählt man den richtigen mobilen Roboter für sein Projekt aus?
Die Umgebung, in der sich der Roboter bewegen soll, ist ein sehr wichtiger Faktor, da diese Umgebung nicht verändert werden kann; dies ist eine der größten Einschränkungen.
Je nach Umgebung und Gelände, auf dem sich der Roboter bewegt, und je nach seinen Aufgaben wird die Fortbewegung unterschiedlich sein:
- Mechanum-Räder ➡ ermöglicht seitliche Bewegungen, geeignet für Lagerhäuser und Indoor-Navigation (Typ Roboter Dingo von Clearpath Robotics)
- Geländeräder ➡ für die Outdoor-Navigation, geeignet für Erkundungsmissionen, Landwirtschaft usw. (Typ Roboter RR100 von Generation Robots)
- Raupen ➡ Navigation im Freien, auf unebenem Gelände (Schlaglöcher, kleine Gräben, Felsen, Stufen, etc.) (Typ Bunker Pro Roboter)
- 4 Beine ➡ ermöglicht es Robotern, sich auf Treppen oder Steinen zu bewegen ( Robotertyp Spot). Einige Hybridmodelle, wie der B2 von Unitree Robotics, haben Räder an den Enden ihrer Beine.
Ebenfalls zu berücksichtigen sind:
- Die Nutzlast (Wird der Roboter schwere Ausrüstung transportieren müssen?)
- Selbstständigkeit (ein wichtiger Faktor bei Überwachungs- und Sicherheitsmissionen)
- Agilität (Geschwindigkeit und Wenderadius)
- Das dem Projekt zugewiesene Budget
Auch andere Faktoren, wie die einfache Hinzufügung externer Geräte, können von Bedeutung sein. So sind die mobilen Roboter von Agilex mit Schienen ausgestattet, die eine schnelle individuelle Anpassung ermöglichen.
Schließlich ist die Kompatibilität mit ROS oder ROS 2 oft ein entscheidender Faktor bei der Auswahl einer mobilen Basis, insbesondere für Forschung und F&E-Zentren. Alle unsere mobilen Roboter sind ROS-kompatibel.














































Die Kugelrolle A01 ist voll kompatibel mit der Platte Ihres Turtlebot3 Waffle Pi Roboters.

Dank der Anwendung SCOUT können Sie Ihren Roboter Spot auf Entfernung steuern - egal, wo Sie sind!


Der RB-THERON ist eine modulare Lösung, die auf ROS-Architektur basiert und ideal zur Verbesserung der Effizienz von Logistikprozessen in Innenräumen geeignet ist.

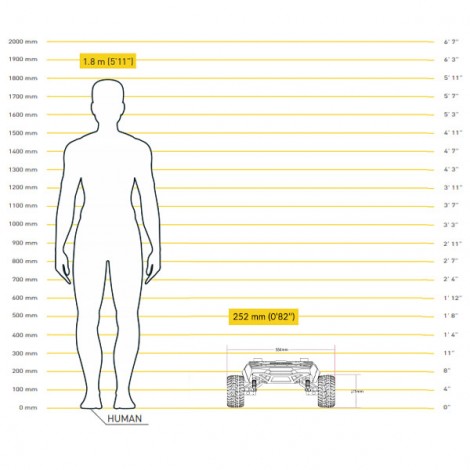
Der autonome mobile Roboter Scout Mini ist schnell, wendig, kompakt und ROS-kompatibel. Scout Mini ist eine vielseitige mobile Roboterplattform, die speziell für modernste wissenschaftliche Projekte entwickelt wurde. Scout Mini ist in der Europäischen Union zertifiziert (CE).



Der Tracer 2.0 ist eine differenzielle Roboterplattform mit zwei angetriebenen Rädern, die für anspruchsvolle Forschungsumgebungen und industrielle Anwendungen entwickelt wurde. Er vereint Geschwindigkeit, Leistung, Ausdauer und Entwicklungsoffenheit für die Anforderungen von Forschern und Ingenieuren.

Eine Batterie, die mit den Robotern Turtlebot 3 und Robotis OP kompatibel ist, einschließlich Schutzsystem.


Eine open-source und umfassende ferngesteuerte Robotikplattform, ausgestattet mit verbesserter Hardware für optimale Leistung.


Der Diablo-Roboter ist ein innovativer Roboter mit drei verschiedenen Bewegungsmodi. Er kann sowohl in der Forschung und Entwicklung als auch für eine Vielzahl von kommerziellen Anwendungen eingesetzt werden.


Die Konstruktionsabteilung von Génération Robots (GR Lab) hat ein ROS-Forschungs- und Entwicklungskit entwickelt, anpassbar an alle unsere mobilen Basen: AgileX, Clearpath, Husarion...


Der Transportkoffer Spot Charger enthält das erforderliche Zubehör zum Laden von ihrem Spot Roboter.

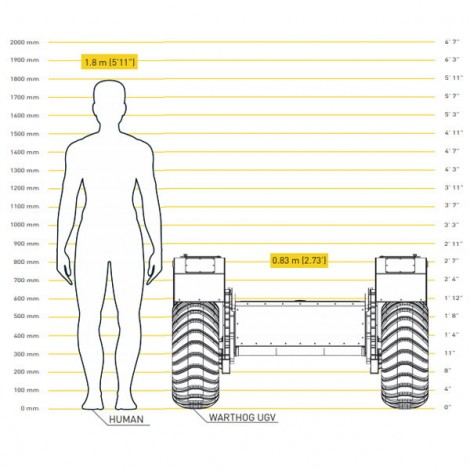
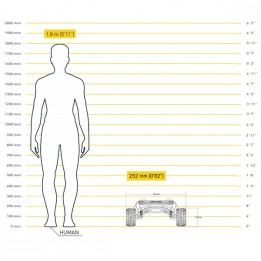
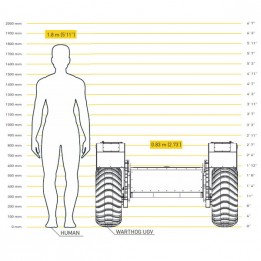
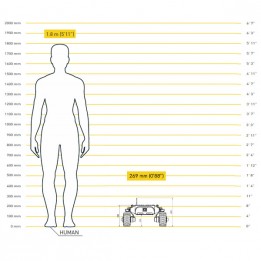
Der mobile ROS-Roboter Warthog ist eine Landdrohne und ein Amphibienfahrzeug zugleich, der sich einer beeindruckenden Größe und Nutzlast rühmen kann. Dafür ist er außerdem ziemlich wendig und schnell!


Planen Sie eine Dockingstation für Ihren Leo Rover ein, um für alle Bedürfnisse Ihres Landroboters gewappnet zu sein!

Der kleine, mobile Roboter Leo Rover zeigt mit diesem Bausatz, was in ihm steckt. Mit dem Leo Rover Developer Kit können Sie die wichtigsten Roboterteile zusammenbauen. Mit dem inbegriffenen Raspberry Pi, dem Controller Leo HAT und der ROS-basierten Programmierungsumgebung steht Ihrer Programmierung nichts mehr im Wege!

Mit dem LIMO Simulationstisch können Sie testen, wie gut Ihr Roboter LIMO autonom navigieren und die Signale, die er auf seinem Weg findet, analysieren kann.

Diese LIPO-Batterie mit einer Kapazität von 1800 mAh ist ideal zur Versorgung Ihres Roboters Turtlebot 3, Robotis OP3 oder DARwin-OP. Sie umfasst einen PCM-Schaltkreis zum Schutz gegen Überlast, Entladung und Stromstöße.

Der Lite 3 ist ein fortschrittlicher vierbeiniger Roboter, der Leistung, Agilität und Flexibilität kombiniert und eine modulare Struktur für fortschrittliche Robotik-Entwicklungen bietet.


Lynx ist ein kompaktes und robustes autonomes Bodenfahrzeug (UGV), das für Einsätze im Innen- und Außenbereich konzipiert ist.


Der Mobile AI ist die ideale Lösung für KI-Robotikprojekte, die maximale Flexibilität, fortschrittliche Manipulation und eine sofort einsatzbereite mobile Plattform erfordern.


Die Bodendrohne A300 von Clearpath Robotics ist eine robuste mobile Plattform, die 100 kg tragen kann, eine Betriebsdauer von bis zu 12 Stunden hat und mit ROS 2 Jazzy kompatibel ist, um Sensoren einfach integrieren zu können.


Der Ranger 4WS4WD-Roboter verfügt über eine Konfiguration mit vier angetriebenen und gelenkten Rädern, die es ihm ermöglicht, sich problemlos auf unebenem Gelände und schwierigen Oberflächen zu bewegen.


Der Panther ist ein industrietauglicher Gelände-Unmanned Ground Vehicle (UGV), der für Outdoor-Anwendungen konzipiert wurde. Es handelt sich um eine autonome und Open-Source-Roboterplattform, die mit ROS und ROS2 betrieben wird.


Der RB-SUMMIT ist ein autonomer mobiler Roboter, der für Innen- und Außeneinsätze in der Forschung und Entwicklung (F&E) konzipiert ist und außergewöhnliche Vielseitigkeit, Flexibilität und Modularität bietet.


Der RB-VOGUI ist ein autonomer mobiler Roboter (AMR), der für logistische Aufgaben im Innen- und Außenbereich entwickelt wurde und Vielseitigkeit sowie hohe Mobilität bietet.

Der mobiler Indoor-Roboter Apollo 2.0 von Slamtec ist eine mittelgroße autonome Plattform, die für fortschrittliche Robotikanwendungen entwickelt wurde: autonome Navigation, Etagenlieferung, intelligente Hindernisvermeidung und Multi-Roboter-Koordination.