Mobile Roboter
Die mobile Robotik bietet in ihren Anwendungen einen echten Mehrwert. Mobile Roboter sind hochentwickelte Werkzeuge, deren Autonomie Menschen bei anstrengenden oder gefährlichen Aufgaben entlasten kann.
Was ist ein autonomer mobiler Roboter?
Ein autonomer mobiler Roboter ist ein Roboter, der sich an einem offenen oder geschlossenen Ort bewegen kann. Er bleibt nicht an einer bestimmten Position fixiert. Der autonome mobile Roboter kann seine Umgebung kartografieren und so frei navigieren, ohne von einem Bediener gesteuert zu werden.
Autonome mobile Roboter benötigen keine externen Relais (wie z. B. Beacons), um zu navigieren. Stattdessen verwenden sie die SLAM-Technologie (Simultaneous Localization And Mapping), die es ihnen ermöglicht, in Echtzeit eine Karte ihrer Umgebung zu erstellen, diese zu verbessern und sich darin zu lokalisieren. Wenn es ihre Aufgabe zulässt, können die autonomen mobilen Roboter auch teleoperiert werden.
In den meisten Fällen besteht ein autonomer mobiler Roboter aus :
- Einem Chassis (mit Motoren und Controller)
- Von einem Bordcomputer
- Von einer Batterie
- Von Sensoren (mindestens ein LiDAR)
- Von Aktuatoren
Die Sensoren und Aktoren, mit denen eine mobile Basis ausgestattet ist, hängen von den Missionen ab, die sie ausführen soll.
Beispiele für Sensoren :
- Thermischer Detektor
- Panorama-Kamera
- Gaswarngerät
- Bewegungsmelder
- Mikrofon
- Etc
Beispiele für Aktuatoren :
- Roboterarm
- Bildschirm
- Lautsprecher
- Drohne
- Etc
Mobile Roboter: Aufgaben und Anwendungen
In welchen Situationen kann die mobile Robotik einen echten Mehrwert darstellen? Es würde zu weit führen, all die Fälle aufzulisten, in denen mobile Basen eine enorme Zeitersparnis bringen oder die Risiken oder Ermüdung für Menschen verringern können. Ganz zu schweigen von den Situationen, in denen sich der mobile Roboter als unverzichtbar erweisen kann. Zum Beispiel sind für Inspektionsaufgaben in gefährlichen Umgebungen mobile Roboter unerlässlich, um Sicherheit und Effizienz zu gewährleisten.
Nachfolgend einige Anwendungsbeispiele:
- Nuklearer Rückbau
- Weltraumforschung (Rover, Sammeln von Proben, etc.)
- Transport von schwerer Ausrüstung (Baustellen, Rettungsmissionen, wissenschaftliche Missionen usw.)
- Beförderung von Post, Medikamenten und leichter Ausrüstung innerhalb eines einzelnen Gebäudes, eines Gebäudekomplexes oder eines Stadtviertels
- Automatisierung der Reinigung in der Tierhaltung
- Die Überwachung und vorbeugende Wartung sensibler Anlagen (SEVESO-Standorte, Flughäfen, Öl & Gas)
- Etc
Wie wählt man den richtigen mobilen Roboter für sein Projekt aus?
Die Umgebung, in der sich der Roboter bewegen soll, ist ein sehr wichtiger Faktor, da diese Umgebung nicht verändert werden kann; dies ist eine der größten Einschränkungen.
Je nach Umgebung und Gelände, auf dem sich der Roboter bewegt, und je nach seinen Aufgaben wird die Fortbewegung unterschiedlich sein:
- Mechanum-Räder ➡ ermöglicht seitliche Bewegungen, geeignet für Lagerhäuser und Indoor-Navigation (Typ Roboter Dingo von Clearpath Robotics)
- Geländeräder ➡ für die Outdoor-Navigation, geeignet für Erkundungsmissionen, Landwirtschaft usw. (Typ Roboter RR100 von Generation Robots)
- Raupen ➡ Navigation im Freien, auf unebenem Gelände (Schlaglöcher, kleine Gräben, Felsen, Stufen, etc.) (Typ Bunker Pro Roboter)
- 4 Beine ➡ ermöglicht es Robotern, sich auf Treppen oder Steinen zu bewegen ( Robotertyp Spot). Einige Hybridmodelle, wie der B2 von Unitree Robotics, haben Räder an den Enden ihrer Beine.
Ebenfalls zu berücksichtigen sind:
- Die Nutzlast (Wird der Roboter schwere Ausrüstung transportieren müssen?)
- Selbstständigkeit (ein wichtiger Faktor bei Überwachungs- und Sicherheitsmissionen)
- Agilität (Geschwindigkeit und Wenderadius)
- Das dem Projekt zugewiesene Budget
Auch andere Faktoren, wie die einfache Hinzufügung externer Geräte, können von Bedeutung sein. So sind die mobilen Roboter von Agilex mit Schienen ausgestattet, die eine schnelle individuelle Anpassung ermöglichen.
Schließlich ist die Kompatibilität mit ROS oder ROS 2 oft ein entscheidender Faktor bei der Auswahl einer mobilen Basis, insbesondere für Forschung und F&E-Zentren. Alle unsere mobilen Roboter sind ROS-kompatibel.














































Planen Sie eine zusätzliche Leo Rover Batterie mit ein, um bei Ihrem Landroboter in puncto Stromverbrauch für alle Fälle gewappnet zu sein!

Sie brauchen einen zusätzlichen Akku für Ihren Roboter Spot? Neben dem Lade- und Transportkoffer ist ein Extra-Akku immer praktisch, damit Ihrem vierbeinigen Roboter nie die Energie ausgeht.

Der X30 von Deep Robotics verkörpert technologische Exzellenz in der quadrupeden Robotik. Er stellt eine Schlüsseltechnologie für Branchen dar, die autonome, sichere und zuverlässige Inspektionen in extremen oder komplexen Umgebungen erfordern.


Der Warthog Tracked ist eine Kettenboden-Drohne, die für den autonomen Einsatz in schwierigstem Gelände entwickelt wurde – dank robuster Bauweise und ROS-Kompatibilität.


Entdecken Sie den Vitirover Academic, einen umweltfreundlichen Roboter Made in France, der sich ideal für den Hochschulunterricht und die Forschung eignet. Er wird von Solarzellen gespeist und verfügt über einen Vierradantrieb, wodurch er sich perfekt für komplexes Gelände eignet. Programmieren Sie ihn ganz einfach über Web-, Python- oder ROS-Schnittstellen und fügen Sie Sensoren für Ihre Projekte hinzu.


Spot ist eignet sich gleichermaßen für Forschungs- und Unterrichtszwecke und zur Entwicklung von industriellen und Dienstanwendungen im Bereich Robotik.



Der PUMA M20 Pro ist eine rollende, vierbeinige Robotikplattform, die Rechenleistung, industrielle Robustheit und extreme Mobilität vereint. Er wurde für anspruchsvolle Umgebungen und fortschrittliche Forschungsmissionen entwickelt.

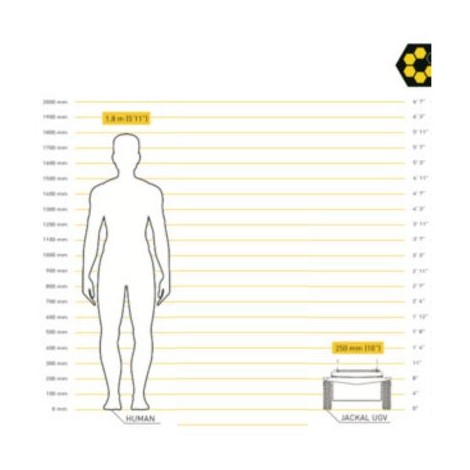
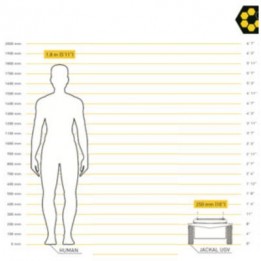
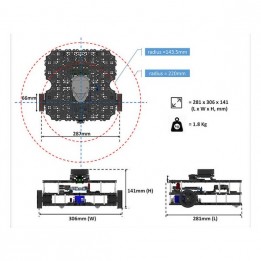
Sie möchten einen mobilen Hardcore-Roboter kennenlernen, der auf Feldwegen ebenso schnell vorankommt wie auf dem Linoleumboden in der Küche? Dann ist das unbemannte Landfahrzeug Jackal genau das Richtige für Sie, eine kompakte mobile Roboterplattform, die schnell und wendig ist und allerhand aushält!


UMR (Gemeinsame Forschungseinheit) ist eine fortschrittliche und vielseitige Roboterplattform. Mit ihrem innovativen Design, dem integrierten NAVIS-Navigationssystem und unabhängigen Nabenmotoren passt sich UMR verschiedenen Anwendungen an und bewährt sich in schwierigen Umgebungen.

Erinnern Sie sich noch an den Turtlebot 3 Waffle, diese fortschrittliche Roboterplattform für Forschungszwecke, die wie eine Waffel aussieht? Wir präsentieren Ihnen hier den TurtleBot3 Waffle Pi, einen völlig neuen mobilen Roboter, der mit einem Rapberry Pi 3 samt kompatiblem Kameramodul angeboten wird!

Möchten Sie Ihrem Turtlebot 3 noch etwas hinzufügen? Mit der IPL-01 Plattform für TurtleBot Waffle sind Sie für alle Fälle gerüstet!

12 IBB-01 Strukturteile für TurtleBot Waffle. Damit lassen sich neue Teile anschließen, um Ihre mobile Roboterplattform zu verbessern.

Das SWD® Starter Kit ist ein Entwicklungskit für AGV (Automated Guided Vehicle), AGC (Automated Guided Carrier) und AMR (Autonomous Mobile Robot). Damit können Sie schnell mit der Entwicklung Ihres mobilen, mit der Motorisierungstechnologie ez-Wheel SWD® Safety Wheel Drive kompatiblen Roboters beginnen.
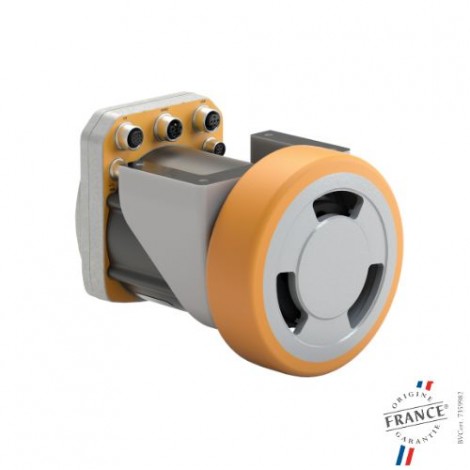

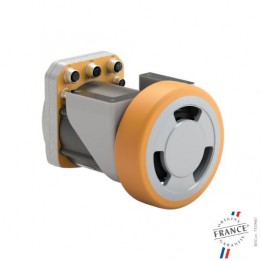
Die SWD® 125 Safety wheel drive, sicher für AGV/AMR, bietet exklusive Funktionen, Kompatibilität mit Sicherheits-Scannern und unterstützt bis zu 250 kg mit einem SIL2/PLd-Sicherheitsniveau.


Entdecken Sie das Spot Academia & Innovation Kit, eine flexible Plattform für Forschung, Lehre und die Entwicklung neuer Anwendungen.


Das Spot Inspektionspaket liefert zuverlässige Echtzeitdaten, um alle Ihre Inspektionsaufgaben zu automatisieren.


Der Spot für öffentliche Sicherheit hat das Ziel, Menschen zu schützen und gefährliche Situationen sicher zu bewerten.


Der mobile Roboter Spot verfügt über eine Reihe von Lademöglichkeiten – doch diese Ladestation könnte Ihren Einsatz der Plattform von Boston Dynamics revolutionieren.

Bestehen Sie bei Ihrem Turtlebot 3 auf soliden, robusten Rädern: Das Set TB3 Wheel/Tire ISW-01 passt perfekt zu Ihren Dynamixel Servomotoren!


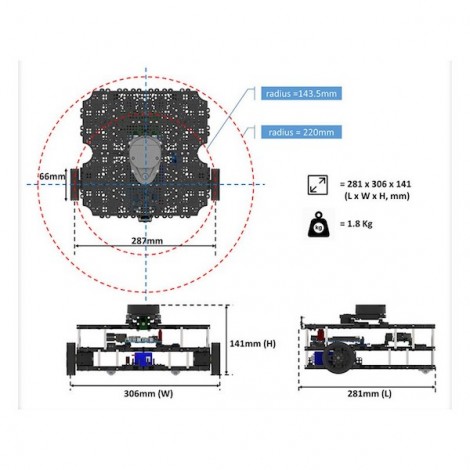
Entdecken Sie den ROSbot XL Mobilen Roboter von Husarion, eine autonome mobile Roboterplattform, die für Forschung und Entwicklung, schnelles Prototyping und die Erstellung maßgeschneiderter Roboter für eine Vielzahl von indoor Anwendungen konzipiert wurde.


Der ROSbot 3 und der ROSbot 3 PRO sind mobile Roboterplattformen für den Innenbereich, speziell entwickelt für Forschung und Ausbildung.


Der Roboter Ridgeback ist eine omnidirektional verfahrbare Roboterplattform für den Einsatz in Innenräumen. Der komplett integrierte Roboter ist mit Laserscannern vorne und hinten ausgestattet und besitzt außerdem eine Inertialeinheit. Der Roboter Ridgeback bietet eine native Integration in ROS und Gazebo.


Der RB-KAIROS+ bietet eine umfassende und modulare Lösung zur Erweiterung der Fähigkeiten der Universal Robots-Cobots und ermöglicht eine flexible und leistungsstarke Automatisierung für industrielle Umgebungen.


Die Raupenketten ICT-01 für TurtleBot3 bieten Ihnen die Möglichkeit, abgenutzte Raupenteile Ihres Roboters schnell und einfach auszutauschen. Und schon kann's weitergehen!