




















Avec 15 kg de charge utile, le bras robotique Doosan M1509 offre l'outil parfait pour les opérateurs contraints de manipuler de lourdes charges à répétition.



Le bras robotique Doosan M0609 est un outil robotisé collaboratif idéal pour toutes vos opérations répétitives menées dans un espace réduit.


Le plus polyvalent de la gamme des bras robotiques ROS Doosan offre une portée d'1m30 pour 10 kg de charge utile. Il s'adapte à tous vos projets d'automatisation, aussi bien en termes de force que de souplesse.
Le plateau de fixation pour le bras OpenManipulator-Pro vous permet de fixer facilement votre bras robotisé à une table ou à toute autre surface plane.

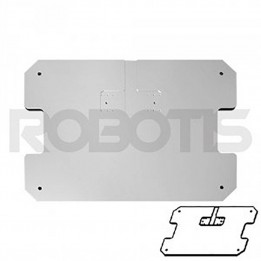
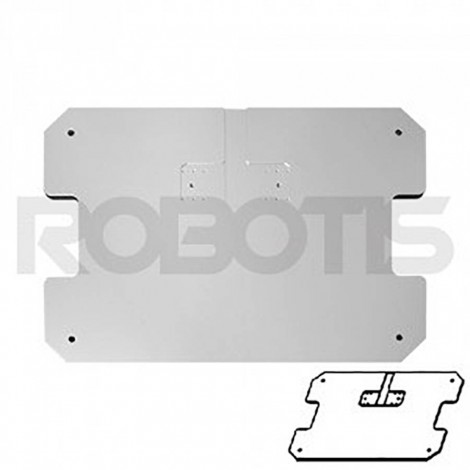
Le Base Plate-02 pour OpenManipulator vous permet de fixer votre accessoire TurtleBot 3 sur une surface plane et sécurisée.


Ce kit pour OpenManipulator RM-X52 vous est proposé ici avec ses servomoteurs. Il vous permet d'ajouter une nouvelle fonctionnalité à votre plateforme robotisée TurtleBot3 Waffle ou Waffle Pi.
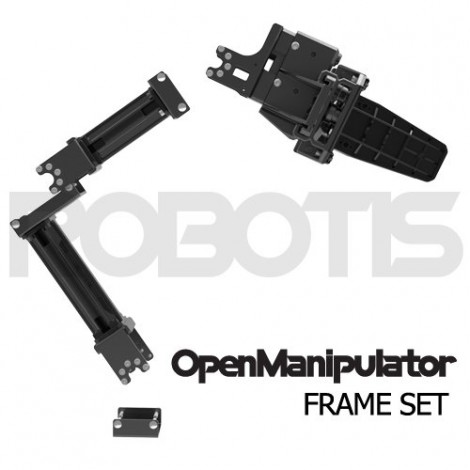
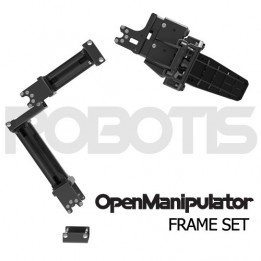
Concevez un bras robotisé OpenManipulator compatible ROS (similaire au bras RM-X52) pour votre robot TurtleBot3. Ce set inclut toutes les parties mécaniques et l'outillage nécessaires.

Certains robots ont plus de poigne que d'autres… et avec le préhenseur Robotis RH-P12-RN, le vôtre fera bientôt partie du club !

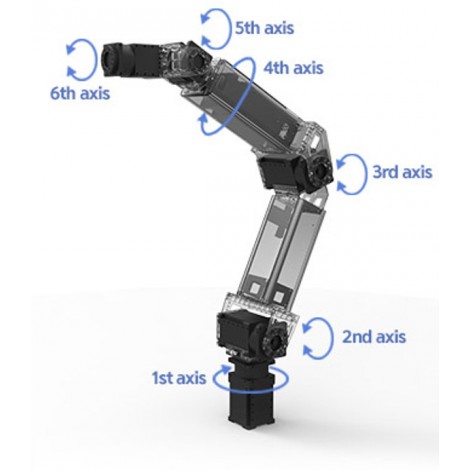
Le bras robotique 6 axes ROBOTIS OpenManipulator-PRO compatible ROS vous impressionnera aussi bien par sa résistance et sa solidité que sa précision et son habileté. Il vous permet un contrôle ultra-précis de la moindre de ses actions et s'accompagne d'un environnement de programmation ultra-complet.

Actionné par six servomoteurs intelligents Dynamixel, le bras robotique WidowX offre une grande agilité et un couple élevé.


Le piédestal pour les robots Sawyer Baxter permet de maintenir celui-ci à une hauteur définie et de déplacer Baxter facilement si nécessaire.

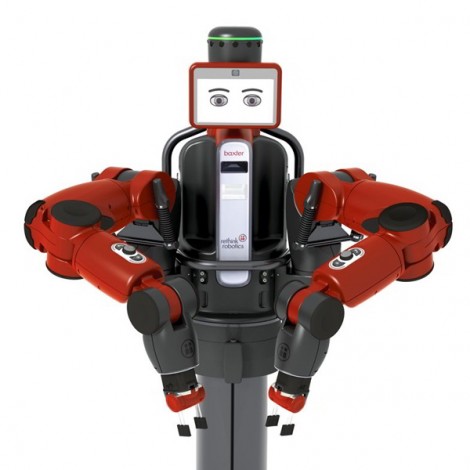
La version recherche et éducation du fameux robot Baxter, créé par Rodney Brooks constitue une base idéale pour de nombreux projets tels que l'informatique, l'intelligence artificielle, l'interaction homme-robot, le contrôle, la reconnaissance et manipulation d'objets, l'apprentissage...