")
")
")
Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,38 € d'éco-participation
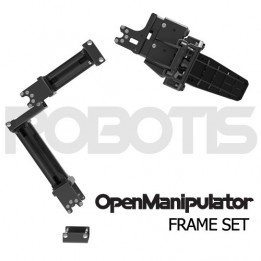
Ce kit pour OpenManipulator RM-X52 vous est proposé ici avec ses servomoteurs. Il vous permet d'ajouter une nouvelle fonctionnalité à votre plateforme robotisée TurtleBot3 Waffle ou Waffle Pi.
Ce bras robotisé compatible ROS est conçu comme une version compacte de l' OpenManipulator RM-X52 , l'un des accessoires TurtleBot3 qui vous permettent d'étendre les fonctionnalités de votre plateforme mobile. Il vous est présenté ici en kit, avec toutes les pièces mécaniques et l'outillage nécessaire. Il inclut aussi 5 servomoteurs Dynamixel compatibles à communication TTL, pour actionner les 5 articulations disponibles.
Avec un poids de 700 g, cet OpenManipulator peut manipuler des objets jusqu'à 500 g, grâce à la charge utile de ses servos. La pince peut saisir des objets de taille variée, entre 2 et 7,5 cm de large.
Ce manipulateur peut être aisément installé sur un Turtlebot3 Waffle Pi ou un Turtlebot3 Waffle , doté d'un contrôleur OpenCR. Programmez-le directement par ce biais, ou reliez-le à votre PC (vous aurez besoin du connecteur U2D2 Dynamixel/PC ). Il inclut le code source et l'environnement de développement nécessaires à son paramétrage.
OpenManipulator bénéficie d'un support 100 % open source, qui vous permet de développer vos propres applications, d'installer de nombreux logiciels gratuits, ou encore de trouver des solutions à vos problèmes via sa communauté d'inventeurs.
")
Ce kit pour OpenManipulator RM-X52 vous est proposé ici avec ses servomoteurs. Il vous permet d'ajouter une nouvelle fonctionnalité à votre plateforme robotisée TurtleBot3 Waffle ou Waffle Pi.