Ressources du robot humanoïde Agibot X2 Ultra
FAQ – Robot humanoïde Agibot X2 Ultra
Quelle différence entre le X2 et le X2 Ultra ?
La version Agibot X2 Ultra se distingue notamment par l’intégration d’un LiDAR 3D, d’une caméra RGB-D, d’un module 4G/5G, d’une carte Orin NX (157 TOPS), de davantage d’interfaces matérielles et du secondary development supporté. C’est la version à privilégier pour des projets avancés en navigation, perception et développement.
Le robot humanoïde Agibot X2 Ultra peut-il naviguer de manière autonome ?
Les ressources officielles présentent des fonctions de navigation autonome et d’évitement d’obstacles. Toutefois, la FAQ du fabricant précise que certaines fonctions avancées dépendent d’un package de conduite autonome avancée et doivent être appréciées dans le cadre d’utilisation prévu.
Le X2 Ultra peut-il retourner automatiquement à sa station de charge ?
Oui mais elle nécessite une station de charge dédiée.
Quels capteurs sont utiles pour un projet de perception ou de navigation ?
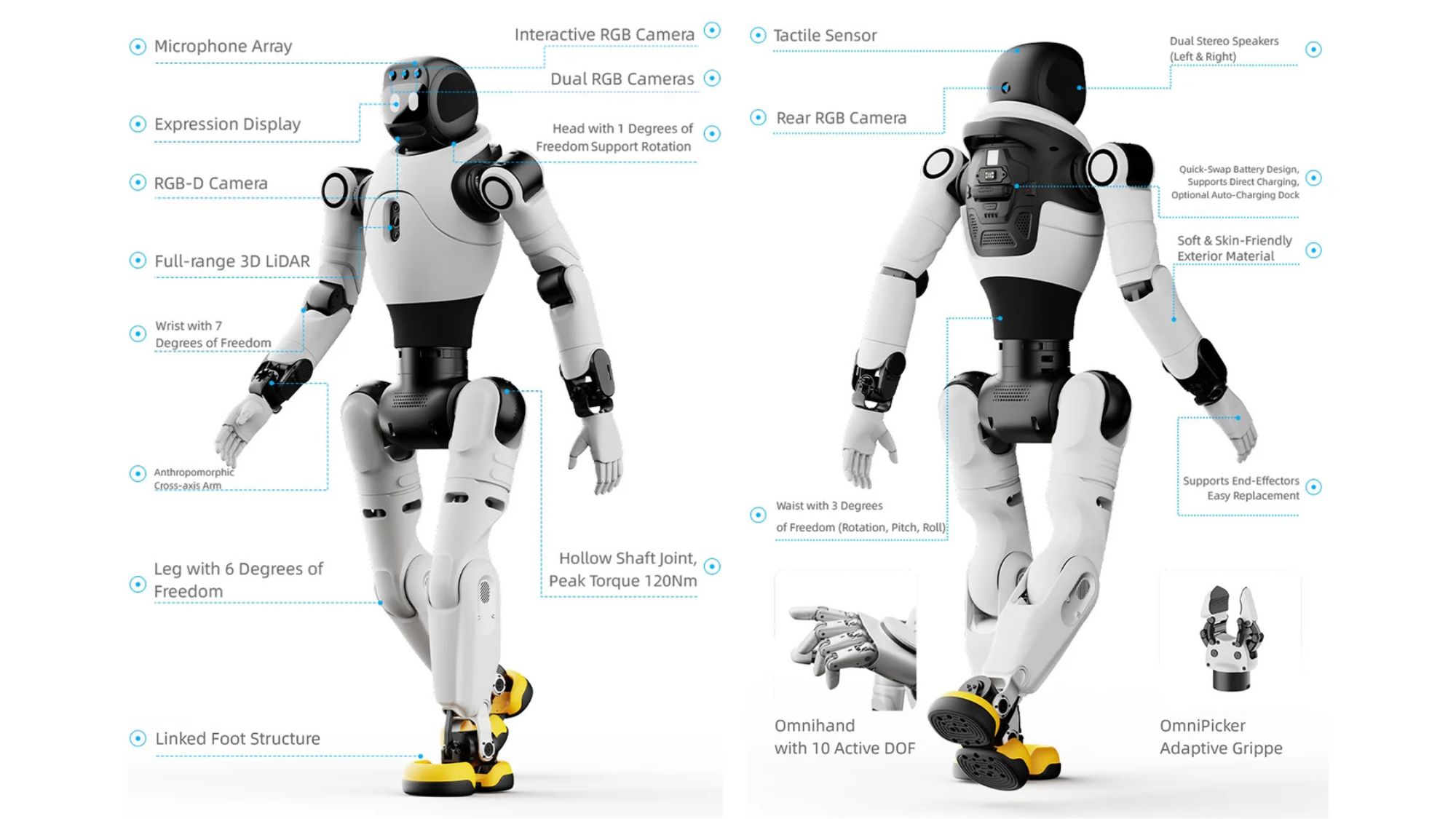
Le Agibot X2 Ultra intègre un LiDAR 3D, une caméra RGB-D, plusieurs caméras RGB, ainsi qu’un capteur tactile. Cet ensemble est intéressant pour des projets combinant perception de l’environnement, interaction et navigation.
Quel niveau d’interaction homme-machine peut-on attendre ?
Une interaction multimodale fondée sur la vision, la voix, le tactile et les expressions faciales. Le robot est donc positionné sur des usages où la présence, l’expression et l’échange avec l’utilisateur ont une place importante.
Le robot est-il adapté à un projet de développement logiciel ou d’intégration ?
Oui, le développement secondaire est supporté. Pour un projet structuré, il est conseillé de valider en amont le périmètre exact des outils fournis : documentation, interfaces logicielles, niveau d’ouverture, support technique et options incluses.
Que faut-il vérifier avant achat ?
Avant commande, il est recommandé de confirmer les options réellement incluses, le niveau de support technique, les fonctions logicielles activées, les besoins réseau, la station de charge éventuelle et les conditions d’intégration dans votre environnement cible.