Robot umanoidi
I robot umanoidi sono piattaforme robotiche progettate per riprodurre parzialmente la morfologia umana, con una testa, un torso, braccia e, a seconda del modello, gambe articolate. Questa architettura non risponde soltanto a un obiettivo di somiglianza: serve soprattutto a studiare come un robot possa percepire, muoversi, manipolare e interagire in ambienti progettati per gli esseri umani.
La robotica umanoide occupa oggi un ruolo importante nella ricerca in robotica, nell’intelligenza artificiale, nell’interazione uomo-robot e nell’insegnamento. Queste piattaforme vengono utilizzate per testare algoritmi di percezione, pianificazione del movimento, controllo in tempo reale e locomozione bipede, offrendo al contempo un supporto concreto per progetti didattici e sperimentali.
In questa categoria trovi diversi approcci alla robotica umanoide, con piattaforme sviluppate da Unitree Robotics, Booster Robotics, oltre a riferimenti riconosciuti nel mondo dell’educazione e della ricerca come NAO e Poppy.
Perché utilizzare un robot umanoide?
Un robot umanoide consente di affrontare problematiche robotiche difficili da studiare con un semplice braccio robotico o con una base mobile tradizionale. La sua struttura impone vincoli simili a quelli presenti nei sistemi biologici o negli ambienti umani: equilibrio, coordinazione motoria, percezione multimodale, interazione vocale o gestuale e manipolazione in spazi ristretti.
Questi robot sono particolarmente interessanti per lavorare su:
- interazione uomo-robot
- locomozione bipede ed equilibrio dinamico
- manipolazione robotica
- percezione visiva, uditiva e spaziale
- sistemi di intelligenza artificiale embedded
Vengono quindi utilizzati in università, laboratori di ricerca, scuole di ingegneria e centri di innovazione che desiderano sperimentare approcci avanzati nella robotica autonoma.
Confronto tra robot umanoidi
Non tutte le piattaforme umanoidi rispondono agli stessi obiettivi. Alcune sono pensate per l’insegnamento e l’interazione, altre per la ricerca avanzata sulla locomozione o sulla percezione. La tabella seguente offre una panoramica dei principali orientamenti dei robot umanoidi più conosciuti nell’educazione e nella ricerca.
| Robot | Produttore | Posizionamento | Punti di forza | Usi frequenti |
|---|---|---|---|---|
| H1 / G1 | Unitree Robotics | robotica umanoide avanzata | locomozione bipede dinamica, equilibrio, controllo del movimento | ricerca, IA embedded, sperimentazione robotica |
| Booster T1 | Booster Robotics | piattaforma tecnologica umanoide | locomozione, percezione, dimostrazione tecnologica | R&S, dimostratori, progetti di innovazione |
| NAO | Maxtronics | insegnamento e interazione uomo-robot | ecosistema educativo, sensori integrati, programmazione accessibile | educazione, divulgazione scientifica, ricerca HRI |
| Poppy Humanoid | Poppy Project | piattaforma open source | modularità, sperimentazione, personalizzazione meccanica | ricerca accademica, prototipazione, progetti educativi |
I robot umanoidi Unitree Robotics
Unitree Robotics sviluppa una nuova generazione di robot umanoidi progettati per la ricerca avanzata. Nota inizialmente per i suoi robot quadrupedi, l’azienda propone anche piattaforme umanoidi destinate allo studio della locomozione bipede, della stabilizzazione dinamica e del controllo del movimento in tempo reale.
I robot umanoidi Unitree sono particolarmente interessanti per i team che lavorano su:
- camminata bipede dinamica
- equilibrio del robot in movimento
- coordinazione dell’intero corpo
- percezione dell’ambiente e intelligenza embedded
Queste piattaforme sono adatte a progetti di ricerca nei quali le prestazioni motorie e il controllo del movimento rappresentano sfide centrali.
Booster Robotics
Booster Robotics sviluppa anche robot umanoidi progettati come piattaforme tecnologiche per laboratori e progetti di innovazione. Questi robot vengono utilizzati per sperimentare locomozione, percezione robotica e integrazione di componenti software avanzati.
Le piattaforme Booster Robotics consentono in particolare di lavorare su:
- locomozione umanoide
- coordinazione motoria
- integrazione di sistemi di visione e sensori
- dimostrazioni robotiche avanzate
Questo posizionamento le rende una soluzione interessante per i team che desiderano sviluppare dimostratori o esplorare nuovi approcci nella robotica umanoide.
NAO
Il robot NAO è uno dei riferimenti più conosciuti nel campo dell’educazione e della ricerca. Le sue dimensioni compatte, la struttura umanoide e l’ecosistema software lo rendono una piattaforma particolarmente adatta all’apprendimento della robotica, della programmazione e allo studio dell’interazione uomo-robot.
NAO viene spesso utilizzato per:
- l’insegnamento della programmazione robotica
- progetti di intelligenza artificiale
- studi sull’interazione uomo-robot
- dimostrazioni educative e scientifiche
Rappresenta una piattaforma accessibile per gli istituti che desiderano introdurre la robotica umanoide in progetti educativi o di divulgazione scientifica.
Poppy
Poppy è una piattaforma umanoide open source sviluppata per la ricerca e l’insegnamento. La sua architettura modulare consente a ricercatori, docenti e studenti di modificare il robot, sperimentare diversi approcci meccanici e testare algoritmi di controllo del movimento.
Poppy è particolarmente interessante per:
- ricerca accademica
- robotica open source
- sperimentazione sul movimento
- progetti educativi in meccatronica e robotica
La sua natura aperta lo rende uno strumento rilevante per i team che desiderano non solo utilizzare un robot, ma anche comprenderne ed evolverne la struttura.
La locomozione bipede nella robotica umanoide
La locomozione bipede è una delle principali sfide della robotica umanoide. Camminare su due gambe richiede al robot di mantenere l’equilibrio gestendo al tempo stesso movimenti complessi, trasferimenti di carico e continui aggiustamenti in risposta alle perturbazioni.
Per raggiungere questa stabilità, i robot umanoidi si basano generalmente su:
- sensori inerziali (IMU) per misurare orientamento e accelerazione
- controllori in tempo reale per pilotare le articolazioni
- modelli dinamici del robot e del suo centro di massa
- algoritmi di stabilizzazione e pianificazione del passo
Camminata, rialzarsi, mantenimento della postura o compensazione delle perturbazioni sono tutti temi studiati grazie a queste piattaforme. La bipedia non è quindi soltanto una funzione spettacolare: rappresenta un vero campo di ricerca nella robotica avanzata.
Sensori e intelligenza artificiale embedded
I robot umanoidi moderni integrano diversi sensori che consentono loro di percepire l’ambiente e adattare il proprio comportamento. Questa percezione è essenziale per l’interazione, la navigazione, la manipolazione e la comprensione di situazioni complesse.
A seconda del modello, un robot umanoide può integrare:
- telecamere RGB o stereo per la visione
- sensori di profondità
- microfoni per il riconoscimento vocale
- sensori di forza o coppia nelle articolazioni
- sensori inerziali per il controllo della postura
Questi dati possono essere sfruttati da sistemi di intelligenza artificiale embedded per:
- riconoscere oggetti, volti o gesti
- interpretare comandi vocali
- pianificare movimenti adattati all’ambiente
- regolare la postura o la traiettoria del robot
La combinazione tra percezione embarcata, calcolo e controllo del movimento rende quindi i robot umanoidi preziose piattaforme sperimentali per la robotica autonoma e l’IA applicata.
Applicazioni dei robot umanoidi
I robot umanoidi vengono utilizzati principalmente come piattaforme di sperimentazione. Il loro interesse risiede meno in una promessa generica di automazione e più nella capacità di riunire, all’interno di uno stesso sistema, problematiche legate a movimento, percezione e interazione.
Vengono infatti impiegati in progetti riguardanti:
- robotica umanoide
- interazione uomo-robot
- percezione multimodale
- locomozione ed equilibrio
- insegnamento della robotica e dell’intelligenza artificiale
Per i laboratori e gli istituti di formazione, rappresentano piattaforme complete per esplorare problematiche trasversali che spaziano dalla meccatronica al software embedded.
Scegliere un robot umanoide
La scelta di un robot umanoide dipende da diversi criteri: livello tecnico richiesto, obiettivi didattici o scientifici, tipo di interazione attesa, sensori disponibili, compatibilità software, architettura meccanica e robustezza della piattaforma.
Una piattaforma destinata all’insegnamento della programmazione non risponde necessariamente alle stesse esigenze di un robot progettato per la ricerca sulla locomozione bipede o sull’intelligenza artificiale embedded. È quindi utile distinguere tra robot orientati alla didattica, piattaforme open source e sistemi più avanzati destinati alla ricerca sperimentale.
FAQ – Robot umanoidi
Che cos’è un robot umanoide?
Un robot umanoide è un robot la cui struttura si ispira parzialmente al corpo umano. Può includere una testa, un torso, braccia e talvolta gambe articolate per studiare percezione, movimento e interazione in ambienti progettati per gli esseri umani.
A cosa serve un robot umanoide?
I robot umanoidi vengono utilizzati nella ricerca in robotica, nell’insegnamento, nell’intelligenza artificiale, nella locomozione bipede, nell’interazione uomo-robot e nelle dimostrazioni tecnologiche.
Quali sono i vantaggi di un robot umanoide per la ricerca?
Un robot umanoide consente di lavorare contemporaneamente su diverse problematiche: controllo del movimento, equilibrio dinamico, visione robotica, percezione, manipolazione, interazione sociale e intelligenza artificiale embedded.
Qual è la differenza tra un robot umanoide e un robot quadrupede?
Un robot umanoide adotta una morfologia vicina a quella di un essere umano, mentre un robot quadrupede si basa su una locomozione a quattro zampe. I robot umanoidi sono particolarmente interessanti per la bipedia, la manipolazione e l’interazione in ambienti umani, mentre i quadrupedi sono spesso preferiti per la loro stabilità su terreni complessi.
Quali robot umanoidi vengono utilizzati oggi nell’educazione e nella ricerca?
Diverse piattaforme sono impiegate nell’educazione e nella ricerca, in particolare i robot sviluppati da Unitree Robotics, Booster Robotics, oltre a riferimenti riconosciuti come NAO e Poppy.
Perché la locomozione bipede è un tema importante?
La locomozione bipede richiede che il robot mantenga l’equilibrio controllando con precisione articolazioni e punti di contatto. Si tratta quindi di un tema centrale nella robotica umanoide, nel controllo in tempo reale e nella dinamica del movimento.
Quali sensori si trovano in un robot umanoide?
I robot umanoidi possono integrare telecamere, sensori di profondità, microfoni, IMU, oltre a sensori di forza o di posizione nelle articolazioni. Questi elementi permettono al robot di percepire l’ambiente e adattare il proprio comportamento.









































AI WORKER è una piattaforma robotica “Physical AI” che combina doppio braccio 7-DOF, percezione RGBD e calcolo a bordo Jetson AGX Orin, progettata per apprendere compiti tramite dimostrazione ed eseguirli in condizioni reali (assemblaggio, ispezione, logistica).


Unitree R1 Edu è una piattaforma umanoide per R&S e didattica incentrata su locomozione, manipolazione e IA a bordo, con accesso alla programmazione di alto e basso livello e alla simulazione (ad es. Isaac Sim).


Il Booster K1 è un robot umanoide progettato per l’istruzione, la ricerca e le dimostrazioni interattive. Combina mobilità, potenza di calcolo ed ergonomia in un formato compatto e pronto all’uso.


NAO Activities è una soluzione educativa interattiva basata sull’intelligenza artificiale generativa, progettata per rendere l’apprendimento più coinvolgente e immersivo con il robot umanoide NAO.


Il Booster T1 è un robot umanoide open-source, leggero e ad alte prestazioni, progettato per sviluppatori e ricercatori, con API completa, compatibilità ROS2 e funzionalità avanzate di simulazione e IA.

Il Unitree G1 Edu è un robot umanoide compatto per didattica e ricerca, con sensori (camera di profondità + LiDAR 3D), una piattaforma di calcolo Jetson Orin e mani dexter opzionali per manipolazione e sviluppo.


Il Unitree H1 / H1-2 è un robot umanoide a grandezza naturale progettato per R&S, che unisce locomozione dinamica e percezione 3D a 360° (LiDAR 3D + camera di profondità).


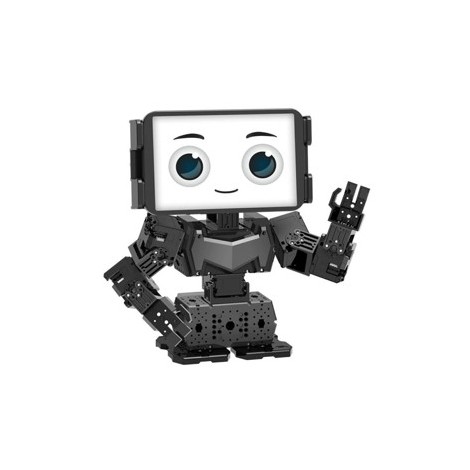
Questo nuovo kit Robotis Engineer, progettato per l'istruzione superiore in robotica e programmazione, include un modulo fotocamera Raspberry Pi V2 e una scheda Raspberry Zero per sviluppare le tue capacità di visione robotica.

Il kit Robotis Engineer - 1 offre una gamma di soluzioni robotiche per l'insegnamento, lo sviluppo di applicazioni e le competizioni. Può essere utilizzato per creare varie piattaforme robotiche articolate e intelligenti.


Kit per la costruzione di un robot Poppy Torso con elettronica Raspberry Pi e parti 3D (il kit senza parti 3D è disponibile su richiesta). La versione Torso non ha gambe, a differenza del Poppy umanoide. Questo kit di robotica non include uno schermo per gli occhi di Poppy né parti strutturali stampate in 3D.


Kit per la costruzione di un robot Poppy Torso con elettronica Raspberry Pi e parti 3D (il kit senza parti 3D è disponibile su richiesta). La versione Torso non ha gambe, a differenza del Poppy Umanoide.

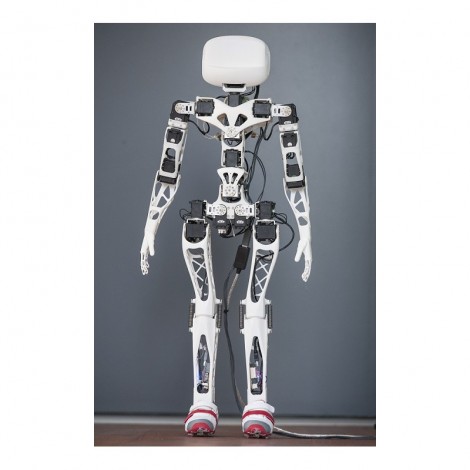
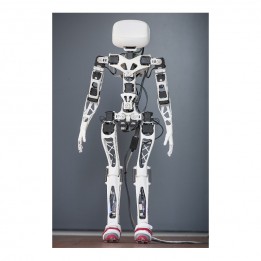
Kit per la costruzione di un robot umanoide Poppy utilizzando l'elettronica di Raspberry Pi 4. Questo kit di robotica non include parti strutturali stampate in 3D.


Kit per la costruzione di un robot umanoide Poppy con elettronica Raspberry Pi. Questo kit contiene tutti i componenti (servomotori Dynamixel, elettronica, connettori, ecc.), comprese le parti strutturali in stampa 3D di alta qualità (il kit senza parti 3D è disponibile su richiesta).


NAO6 in grigio scuro è la sesta versione del robot umanoide interattivo. NAO è autonomo e completamente programmabile. Il robot è progettato per l'istruzione e professionali.

Utilizzate queste piccole parti della struttura Robotis Premium FP04-F10 con il tuo kit Bioloid Robotis Premium per una perfetta compatibilità hardware.

Una confezione di 6 parti di struttura Robotis FP04-F7, da utilizzare esclusivamente con i kit Bioloid.

Una confezione di 12 parti di struttura in plastica ingegneristica Robotis FP04-F6 per il kit Bioloid.

Progettate per sostituire o completare le parti del kit Bioloid, queste 4 parti strutturali Robotis FP04-F54 sono di quelle che durano!

Hai bisogno di parti di ricambio per il tuo telaio Bioloid? Le parti del telaio Robotis FP04-F53 sono proprio quello che ti serve!

Le parti strutturali Robotis FP04-F51/F52 fanno parte dei kit Bioloid che girano su Dynamixel-AX. Il loro materiale li rende estremamente robusti.

Queste 6 parti strutturali Robotis FP04-F5 si adattano ai kit robotici Bioloid e sono compatibili esclusivamente con i servomotori Dynamixel della serie AX.

Nouvelle évolution du robot humanoïde d'éducation OP par Robotis, Robotis OP3 vous propose des performances améliorées, un système de navigation autonome, et un ROS adapté à tous les utilisateurs de Linux et de Windows.

Parte strutturale FP04-F4 per il kit Bioloid. Compatibile con i servomotori Dynmaixel AX. Non include le viti di fissaggio.

Parte strutturale FP04-F13/F14 per il kit Bioloid. Compatibile con i servomotori Dynmaixel AX. Non include le viti di fissaggio. Questa parte può essere utilizzata come girante sui servomotori AX-12A.