")
")
")
Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,92 € per l'ecotassa
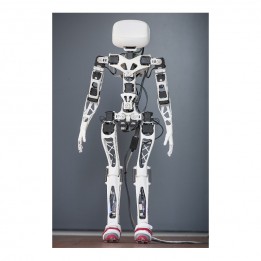
Kit per la costruzione di un robot Poppy Torso con elettronica Raspberry Pi e parti 3D (il kit senza parti 3D è disponibile su richiesta). La versione Torso non ha gambe, a differenza del Poppy Umanoide.
![]()
Poppy è una piattaforma open-source per la creazione, l'utilizzo e la condivisione di oggetti robotici interattivi. Si rivolge a principianti ed esperti, nei settori dell'istruzione, della scienza, dell'arte e, più in generale, del mondo dei maker. È stata progettata come strumento per imparare, creare e condividere idee e tecnologie legate al mondo digitale.
La piattaforma tecnologica Poppy consiste in modelli hardware open-source (CC-BY-SA), una libreria software open-source Pypot basata sul linguaggio Python e un sito web della comunità in cui chiunque può accedere a documentazione, tutorial, software e simulatori e contribuire ai miglioramenti della piattaforma: http: //www.poppy-project.org . Dal 2017, il sito web www.poppy-education.org raccoglie tutte le risorse didattiche esistenti sul progetto.
La piattaforma Poppy comprende attualmente tre robot:
L'ecosistema Poppy, inizialmente sviluppato e supportato dal team Flowers di INRIA , è stato trasferito nel 2018 all'associazione Poppy Station . Questa riunisce attori del mondo delle imprese, della ricerca, della formazione, della cultura e dell'istruzione che condividono una visione comune: che "la robotica è un'opportunità quando viene padroneggiata e messa al servizio dell'umanità".
Génération Robots, distributore di lunga data dei robot Poppy, è uno dei partner fondatori della Poppy Station.
Poppy Torso è la parte superiore (tronco, testa e braccia) dell'umanoide Poppy.

Poppy Torso rappresenta un investimento finanziario inferiore rispetto al kit completo ed è particolarmente interessante per i progetti di robotica umanoide che non richiedono il movimento del robot (interazione uomo-robot, modellazione della mobilità degli arti superiori, ecc.)
Ad esempio, il progetto Cherry , realizzato da 4 studenti dell'ENSEIRB-MATMECA di Bordeaux, al centro del quale c'è Poppy, versione testa e torso. L'obiettivo di questo progetto è studiare e creare una soluzione innovativa al problema della scolarizzazione dei bambini in ospedale.
Di seguito un video dimostrativo di Poppy Torso nell'ambito del progetto Cherry:
Poiché il robot è hardware e software open-source, è possibile progettarne varianti e svilupparlo in base alle proprie esigenze scientifiche, educative o artistiche.
L'obiettivo del progetto Poppy è quello di consentire a tutti di comprendere e partecipare alla creazione del mondo digitale che ci circonda. Il robot Poppy è quindi uno strumento ideale per educatori e insegnanti. Il robot Poppy è stato utilizzato con successo nelle scuole superiori e nelle scuole di ingegneria. Gli studenti, organizzati in gruppi, si concentrano su obiettivi specifici (la progettazione di una nuova parte meccanica, la costruzione di una gamba, l'aggiunta di sensori Arduino, la programmazione di comportamenti specifici, ecc.) e poi, in un approccio integrativo e collaborativo, condividono le loro competenze e imparano gli uni dagli altri.
Il robot Poppy è particolarmente adatto alle associazioni che promuovono la scienza, i maker e altri FabLab. Tutti possono partecipare al progetto condividendo le proprie idee, creazioni o anche ponendo domande sulla piattaforma di discussione: https://forum.poppy-project.org .
Timelapse dell'assemblaggio di Poppy (versione Odroid)
La piattaforma Poppy è utilizzata per condividere il codice e la progettazione del robot. La piattaforma Poppy è stata progettata per consentire ai ricercatori di riprodurre e condividere i risultati ottenuti da un altro laboratorio. In particolare, la modularità del robot Poppy consente di testare diversi progetti, come descritto in questo articolo. Il video seguente spiega come Poppy apra le possibilità scientifiche per esplorare i meccanismi di apprendimento e sviluppo:
L'applicazione Poppy GRR, unica nel suo genere, è stata sviluppata da GR Lab , l' ufficio di progettazione robotica di Génération Robots.
Poppy GRR è l'acronimo di Poppy Generation Robots Replayer. Consente di registrare i movimenti, combinarli e riprodurli. Ma soprattutto, consente di creare esercizi e sessioni complete, che possono essere riprodotte in qualsiasi momento, in modo pratico. La sessione può essere messa in pausa o interrotta utilizzando un' interfaccia grafica basata sul Web.
Per saperne di più sull'applicazione Poppy GRR
Scarica l'applicazione Poppy GRR (versione Beta)
| Parti strutturali 3D |
| Una libreria software di programmazione La libreria  Pypot in Python per la programmazione dei robot realizzati con la piattaforma Poppy. I robot Poppy possono essere programmati anche visivamente utilizzando SNAP! |
| Modelli disponibili per i simulatori Un modello di robot Poppy è disponibile per la simulazione con V-Rep. È in corso il porting su Gazebo.  | Una comunità attiva La comunità di utenti cresce di giorno in giorno, come si evince dall'attività del forum e dall'uso che viene fatto dei vari robot Poppy.  |
Oltre alla programmazione tradizionale in Python, il robot può essere programmato via WiFi da un semplice browser web utilizzando IPython.
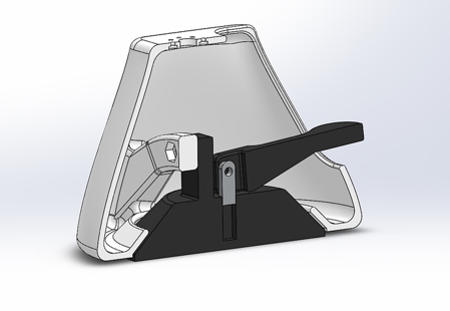
La versione qui presentata (Poppy Torso) non include le gambe di Poppy ed è quindi perfettamente adatta a progetti incentrati su un robot umanoide che non deve muoversi. Il torso è fissato a una ventosa con una leva per una stabilità ottimale. La ventosa e il dado necessari per fissare il torso di Poppy sono inclusi nel kit. È inclusa anche una parte strutturale stampata in 3D per coprire la ventosa e dare al tutto una bella finitura.
Di seguito è riportata una sezione trasversale della ventosa e della parte strutturale:
Nella testa è presente una scheda Raspberry Pi 3 modello B+, che consente di incorporare i programmi e di comunicare via WiFi ed Ethernet. Una telecamera Raspberry all'interno della testa può essere utilizzata per creare programmi che utilizzano la visione artificiale.
Il robot Poppy viene fornito in kit completo. È necessario assemblarlo completamente. Per farlo, è possibile guardare i video di assemblaggio online. Si noti che questi video si basano sulla versione Odroid del robot, che utilizza una scheda Odroid XU4 al posto della scheda Raspberry Pi. Questa versione non è più disponibile sul mercato. L'assemblaggio varia essenzialmente in termini di testa e connettori.
L'elenco dell'hardware incluso nel kit è il seguente:
Le seguenti risorse vi aiuteranno a iniziare l'assemblaggio e la programmazione del robot Poppy Torso.
Segui la procedura di installazione della scheda Odroid tramite questo link./p>
Segui la procedura di connessione all'interfaccia grafica tramite questo link.
Il robot Poppy deve essere collegato alla rete locale tramite un cavo Ethernet e deve trovarsi sulla stessa rete dell'computer in uso. Se il robot è collegato direttamente al computer anziché attraverso la rete, è necessario configurare il computer per condividere la connessione con il robot. Per ulteriori informazioni, puoi consultare questo link.
Puoi trovarla nella sezione Semplicemente: utilizza la scheda SD Poppy tramite questo link.
Puoi trovare tutta la documentazione preparatoria per il robot Poppy su questo link.
Puoi trovare molte informazioni sul forum Poppy. Se i tuoi problemi persistono, puoi contattarci. Puoi visitare il sito su questo link.
")
Kit per la costruzione di un robot Poppy Torso con elettronica Raspberry Pi e parti 3D (il kit senza parti 3D è disponibile su richiesta). La versione Torso non ha gambe, a differenza del Poppy Umanoide.