Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
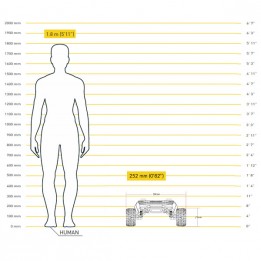
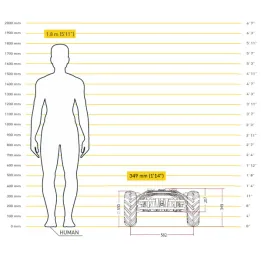
Ce pack clé en main associe l’UGV AgileX Ranger Mini 3.0 et le Kit R&D ROS 2 du GR Lab pour démarrer sans aucune intégration. Passez directement au développement.










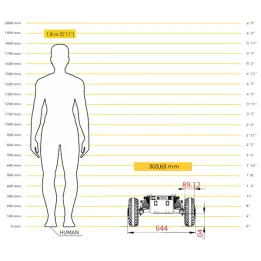
Ce pack clé en main associe l’UGV AgileX Ranger Mini 3.0 et le Kit R&D ROS 2 du GR Lab pour démarrer sans aucune intégration. Passez directement au développement.