Mobiler Roboter Turtlebot
Der TurtleBot ist ein erschwinglicher, vielseitiger und einfach zu bedienender mobiler Innenroboter, der viele Möglichkeiten für das Lernen und die Forschung in der mobilen Robotik bietet. Er ist mit ROS programmierbar und bietet fortgeschrittene Fähigkeiten. Dieser Roboter ist besonders für die Kartierung (SLAM) und Navigation geeignet. Er wird an Universitäten, Forschungslaboren und Unternehmen weit verbreitet eingesetzt, um neue Technologien zu entwickeln und komplexe Robotikprobleme zu lösen.
Ein kompletter mobiler Roboter für Bildung und Forschung
Er ist mit Sensoren wie LiDAR und Kameras ausgestattet, um seine Umgebung zu navigieren und wahrzunehmen. Er wurde entwickelt, um das Lernen und die Forschung in der mobilen Robotik zu erleichtern und wird in vielen Anwendungen wie Kartierung, Objekterkennung und Überwachung eingesetzt.
Der TurtleBot verfügt über eine Nutzlastplattform, um zusätzliche Ausrüstung zu transportieren, was ihn zu einem sehr vielseitigen mobilen Roboter macht. Er ist auch mit einem eingebetteten Computer, einem Navigationssystem und verschiedenen Programmierschnittstellen ausgestattet, die es Entwicklern ermöglichen, das Verhalten des Roboters nach ihren Bedürfnissen anzupassen.
Zusätzlich zu seiner großen Flexibilität ist der TurtleBot auch sehr einfach zu bedienen und zu programmieren. Dank seines modularen Designs kann er leicht mit Zubehör wie Roboterarmen oder zusätzlichen Sensoren erweitert oder angepasst werden. Darüber hinaus bietet die Open-Source-Community rund um den TurtleBot aktive Unterstützung für die Benutzer, was seine Verwendung und Entwicklung weiter erleichtert.
TurtleBot 3 vs TurtleBot4: Was sind die Unterschiede?
| TurtleBot 4 Standard | TurtleBot 4 Lite | TurtleBot 3 Burger | TurtleBot 3 Waffle Pi | |
| Kamera | Luxonis OAK-D Pro Kamera |
Luxonis OAK-D Lite Kamera |
- | Raspberry Pi camera |
| LiDAR | RPLIDAR-A1 | RPLIDAR-A1 | LiDAR LDS-01 | LiDAR LDS-01 |
| Microcontroller | Raspberry Pi 4 B (4 Go) | Raspberry Pi 4 B (4 Go) | Raspberry Pi 3 oder 4 B (2 oder 4 Go) | Raspberry Pi 3 oder 4 B (2 oder 4 Go) |
| Nutzlast | 9kg (15 kg im Kostüm) | 9kg (15 kg im Kostüm) | 15 kg | 30 kg |
| Autonomie | 2h30 – 4h | 2h30 – 4h | 2h30 | 2h |
TurtleBot 4: ein vollständig montierter Roboter mit ROS2
Erhältlich in 2 Modellen: TurtleBot 4 Standard und TurtleBot 4 Lite, ist der TB4 mit einer mobilen Basis von iRobot® Create 3, einem programmierbaren Raspberry Pi4-Computer mit ROS2, einem 2D-LiDAR, einer OAK-D-Kamera und vielen weiteren Funktionen ausgestattet.
Ultraschneller Start mit ROS2
Der TurtleBot 4 hat den Vorteil, bereits mit ROS2 vorinstalliert und konfiguriert zu sein. Er wird mit ausführlicher Benutzerdokumentation, einem Ignition Gazebo Simulationsmodell, Demo-Code und einer Reihe von Tutorials geliefert, was den Einstieg erleichtert und eine schnelle Entwicklung von Anwendungen ermöglicht.
Der TurtleBot 4 ist nun kompatibel mit ROS 2 Humble, einem Update, das viele zusätzliche Funktionen mit sich bringt. Dazu gehören die Unterstützung von Namensräumen, Postzustellung, "Patrol Loop" Navigation und vieles mehr.
Eingebaute Sensoren
Dieser Roboter ist mit zahlreichen integrierten Sensoren ausgestattet, die verschiedene robotische Anwendungen ermöglichen. Zu diesen Sensoren gehören:
- Luxonis OAK-D Tiefenkamera
- 2D RPLIDAR-A1 LiDAR
- IMU
- Optischer Bodenverfolgungssensor
- Radkodierer
- Serie von Infrarotsensoren zur Erkennung von Klippen, Unebenheiten und Rutschen
Die Daten aller dieser Sensoren stehen als ROS-Themen über die mit dem Netzwerk verbundene ROS2-API zur Verfügung.
Open-Source-Plattform
Der TurtleBot 4 verfügt über eine online zugängliche Open-Source-Plattform, die es Ihnen ermöglicht, ihn auszuprobieren, zu erweitern oder sogar Ihre eigene Version zu erstellen. Als Unterstützung für den Open-Source-Ansatz wird ein Teil der Erlöse von jedem ausgelieferten TurtleBot 4 an Open Robotics gespendet.



















Die mobile Basis des TurtleBot 4 Roboters basiert auf dem iRobot® Create® 3-Lernroboter, der eine IMU, einen optischen Bodenverfolgungssensor und Rad-Encoder für eine präzise Positionierung und Lokalisierung bietet. TurtleBot 4 ist in zwei Modellen erhältlich: TurtleBot 4 Standard und TurtleBot 4 Lite


Die mobile Basis des TurtleBot 4 Roboters basiert auf dem iRobot® Create® 3-Lernroboter, der eine IMU, einen optischen Bodenverfolgungssensor und Rad-Encoder für eine präzise Positionierung und Lokalisierung bietet.


Dieser Kamerahalter bietet Ihnen die Möglichkeit, eine Raspberry Pi Kamera an einem Roboter TurtleBot 3 oder am Controller TurtleBot3 OpenManipulator anzuschließen.


Die Kugelrolle A01 ist voll kompatibel mit der Platte Ihres Turtlebot3 Waffle Pi Roboters.


Die Raupenketten ICT-01 für TurtleBot3 bieten Ihnen die Möglichkeit, abgenutzte Raupenteile Ihres Roboters schnell und einfach auszutauschen. Und schon kann's weitergehen!

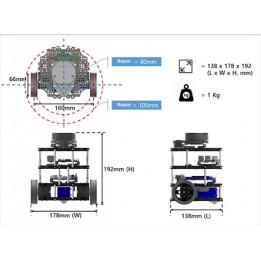
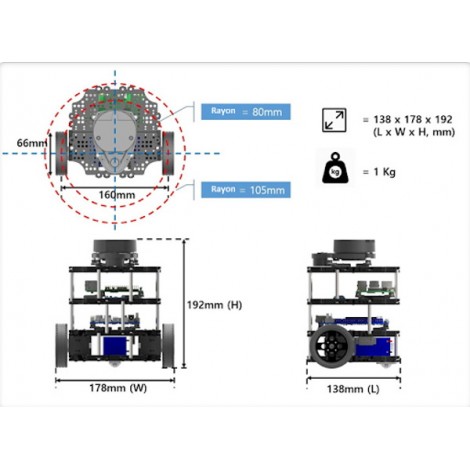
Erinnern Sie sich noch an den Turtlebot 3 Waffle, diese fortschrittliche Roboterplattform für Forschungszwecke, die wie eine Waffel aussieht? Wir präsentieren Ihnen hier den TurtleBot3 Waffle Pi, einen völlig neuen mobilen Roboter, der mit einem Rapberry Pi 3 samt kompatiblem Kameramodul angeboten wird!

Diese LIPO-Batterie mit einer Kapazität von 1800 mAh ist ideal zur Versorgung Ihres Roboters Turtlebot 3, Robotis OP3 oder DARwin-OP. Sie umfasst einen PCM-Schaltkreis zum Schutz gegen Überlast, Entladung und Stromstöße.

12 IBB-01 Strukturteile für TurtleBot Waffle. Damit lassen sich neue Teile anschließen, um Ihre mobile Roboterplattform zu verbessern.

Bestehen Sie bei Ihrem Turtlebot 3 auf soliden, robusten Rädern: Das Set TB3 Wheel/Tire ISW-01 passt perfekt zu Ihren Dynamixel Servomotoren!

Möchten Sie Ihrem Turtlebot 3 noch etwas hinzufügen? Mit der IPL-01 Plattform für TurtleBot Waffle sind Sie für alle Fälle gerüstet!

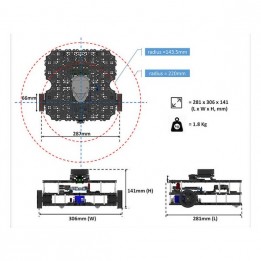
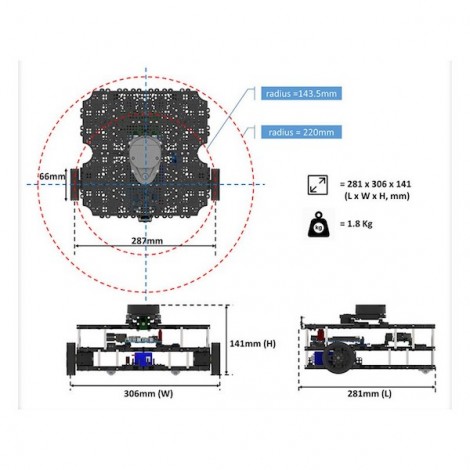
Die mobile Lernplattform Turtlebot 3 Burger ist eine leichte, kompakte, wirtschaftliche und nach Belieben personalisierbare mobile Roboterplattform. Sie stellt eine perfekte Lösung für all jene dar, die eine unterhaltsame Lösung für ihre Roboterprogrammierungs-Workshops suchen, aber auch für angehende Roboterbastler, Entwickler und Designer.

Eine Batterie, die mit den Robotern Turtlebot 3 und Robotis OP kompatibel ist, einschließlich Schutzsystem.