Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Boot, Amphibienfahrzeug, Wasserscooter... Träumen Sie davon, Ihre robotischen Fähigkeiten auf dem Wasser zu testen? Der wasserdichte Servomotor Dynamixel XW540-T260-R ist Ihre Eintrittskarte zu neuen Erfahrungen.
Nein, der Dynamixel XW540-T260-R Servomotor ist nicht 100 % wasserdicht. Aber dank seiner wasserdichten Konstruktion erreicht er die durchaus respektable Punktzahl von 68 im internationalen Schutzstandard:
Was bedeutet das in der Praxis? Dieser Servomotor der Dynamixel Baureihe X kann bis zu 30 Minuten lang in einer Tiefe zwischen 1 und 3 Metern unter Wasser bleiben. Genug, um einige Unterwasser-Expeditionen mit der richtigen Ausrüstung zu starten: rostfreies Fahrgestell und versiegelte Sensoren..
Was den Rest angeht, bleibt dieses XW540-T260-R Modell den gleichwertigen Servos der Robotis-Baureihe würdig.
Zur Erinnerung: Die Dynamixel Servomotoren der Baureihe X gehören zur neuesten Generation der von Robotis entwickelten Servos. Hochauflösende Servomotoren, die verschiedene Betriebsmodi wie PWM-Steuerung und ultrakomplette Rückmeldung zu den Betriebsparametern der Maschine bieten.
Das sehr sorgfältige Design dieses Metall-Servomotors mit RS485-Anschluss und seine Leistung in Bezug auf Übertragungsgeschwindigkeit, Auflösung und Programmierung machen aus ihm ein wasserdichtes Servo erster Klasse. Ein Muss für alle Liebhaber fortschrittlicher Robotertechnik.
Nutzen Sie diese kostenlosen Online-Ressourcen, um alles über Ihren Dynamixel XW540-T260-R Servomotor zu erfahren.
Vergewissern Sie sich, dass der Dynamixel Servomotor richtig konfiguriert ist. Flashen Sie den Motor nochmal mit der Roboplus Software und konfigurieren Sie ihn erneut. Wenn das Problem weiterhin besteht, kontaktieren Sie uns.
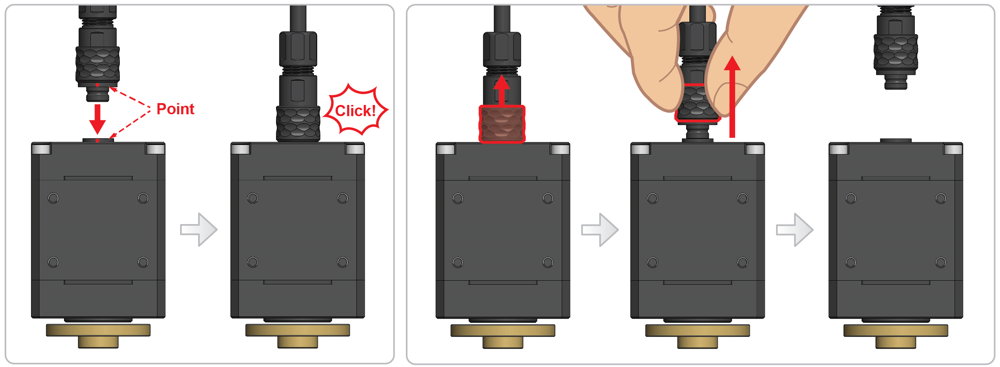
Der Servomotor ist vermutlich schlecht montiert. Vergewissern Sie sich, das dieser gut verschraubt ist und das Servorad richtig sitzt (Punkt auf der Axe und auf der Innenseite des Servorades)
Der Dynamixel Servomotor hat sehr wahrscheinlich ein mechanisches Problem. Bitte kontaktieren Sie unseren technischen Support.
Überprüfen Sie die Stromversorgung und die Anschlüsse (zum Beispiel mit einem anderen Motor). Reinitialisieren Sie Ihren Servomotor Dynamixel. Falls das Problem weiterhin besteht, folgen Sie der Checkliste auf der Seite des Herstellers.
Das 1.0-Protokoll ist spezifisch für die Dynamixel AX- und MX-Serie. Protokoll 2.0 wurde mit der neuen X-Serie und Dynamixel Pro entwickelt. Die Steuertabellen des Protokolls 2.0 enthalten PID-Regler für eine äußerst präzise Einstellung der Servobewegungen. Die Firmware der Servos der MX-Serie kann für die Verwendung von Protokoll 2.0 aktualisiert werden. Weitere Informationen finden Sie auf den Seiten Protokoll 1.0 und Protokoll 2.0.

Boot, Amphibienfahrzeug, Wasserscooter... Träumen Sie davon, Ihre robotischen Fähigkeiten auf dem Wasser zu testen? Der wasserdichte Servomotor Dynamixel XW540-T260-R ist Ihre Eintrittskarte zu neuen Erfahrungen.