Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
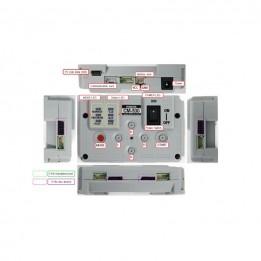
Das OpenCR 1.0 Board wird sowohl als Open-Source Robotercontroller (z.B. für TurtleBot3) eingesetzt als auch als Mikrocontroller dank eines 32 Bit-Prozessors mit FPU, getaktet mit 216 MHz. Sie erhalten dadurch Zugriff auf sämtliche Programmiercodes, technischen Diagramme, Softwareprogramme und das gesamte Hardwareangebot, das für die Lernplattform Turtlebot 3 entwickelt wurde.
Dieser Open-Source Robotercontroller und Mikrocontroller unterstützt die Kommunikation über RS-485 und TTL (für Servos Dynamixel R und T) sowie die Protokolle UART und CAN. Außerdem umfasst er einen USB-Schaltkreis und einen 18-poligen GPIO-Steckverbinder für die Entwicklung Ihres Projekts.
Zusätzlich zur Möglichkeit, zahlreiche Peripheriegeräte an Ihr ROS-Board anzuschließen, bietet das Board OpenCR 1.0 eine Inertialeinheit mit 9 Achsen (Gyroskop, Beschleunigungsmesser und 3-Achsen-Magnetometer) für eine fortschrittliche Steuerung der Position, Rotation, Höhe und Geschwindigkeit Ihres mobilen Roboters. 2 Tasten und 4 LEDs ergänzen dieses attraktive Programm. Auch ein Ausgang für rote/grüne LED-Leuchten als Statusanzeige für den USB-Anschluss ist vorhanden.
Im Lieferumfang enthalten:
Brauchen Sie weitere Informationen zu Ihrem Controller OpenCR 1.0? Keine Sorge, alles da!