Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
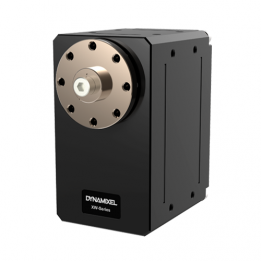
Boat, amphibious vehicle, water scooter... Do you dream of testing your robotic skills on the water? The Dynamixel XW540-T260-R waterproof servo motor is your ticket to new experiences.
No, the Dynamixel XW540-T260-R servo motor is not 100 % waterproof. But its waterproof design allows it to achieve the quite respectable score of 68 in the international protection standard:
Concretely? This Dynamixel X series servo-motor can remain underwater for up to 30 minutes to a depht between 1 and 3 meters. Enough to launch some underwater explorations with the right equipment: rustproof chassis and sealed sensors.
For the rest, this XW540-T260-R model remains worthy of the equivalent series servo motors from Robotis.
As a reminder, the X-Series Dynamixel servo motors are part of the latest generation of servos developed by Robotis. High definition servo motors, offering multiple operating modes such as PWM control and ultra-complete feedback on the machine's operating parameters.
The very careful design of this metal servo motor with RS485 connection and its performance in terms of transmission speed, resolution or programming make it a first class waterproof servo. One of the must-haves for advanced robotic design enthusiasts.
Take advantage of these many free online resources to learn all about your Dynamixel XW540-T260-R servo motor.
Check that your Dynamixel servomotor is correctly configured. Do not hesitate to re-flash it with the ROBOTIS Software Roboplus. After re-flash remember to re-configure it. If the issue is not solved, contact us for an advanced support.
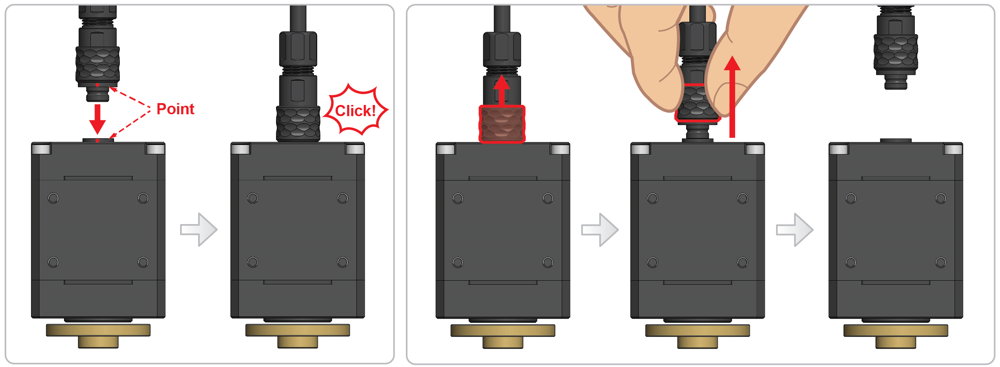
The motor is probably not well mounted. Check that you correctly mounted the horns by respecting the mark.
There is probably a mechanical issue with the Dynamixel servomotor. You can directly contact us to get more advance support.
Check your power supply and the system cabling (try with a different servomotor). You can also reset the servo. If nothing works, the best solution is to go through the Dynamixel servomotor checklist!
The 1.0 protocol is dedicated to the Dynamixel AX and MX series. Protocol 2.0 is for the X and Dynamixel Pro series. Protocol 2.0 control tables include PID controls which allow for more precise adjustment of the servo motor movements. Protocol 2.0 can be updated on MX series servo motors. You can refer to the protocol 1.0 and protocol 2.0 pages for more informations.

Boat, amphibious vehicle, water scooter... Do you dream of testing your robotic skills on the water? The Dynamixel XW540-T260-R waterproof servo motor is your ticket to new experiences.