Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
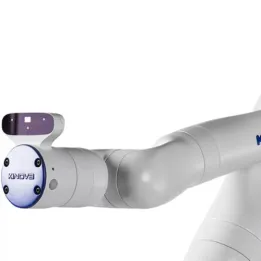
Der Nero ist ein 7-Achsen-Roboterarm (7-DoF), der für Forschungsarbeiten rund um humanoide Robotik und Embodied AI konzipiert wurde. Sein leichtes Design und seine offene Architektur erleichtern die Integration im Labor, Experimente sowie den Einsatz in unterschiedlichen Konfigurationen (Tischmontage, seitlich, invertiert).

Der Nero ist ein 7-Achsen-Roboterarm (7-DoF), der für Forschungsarbeiten rund um humanoide Robotik und Embodied AI konzipiert wurde. Sein leichtes Design und seine offene Architektur erleichtern die Integration im Labor, Experimente sowie den Einsatz in unterschiedlichen Konfigurationen (Tischmontage, seitlich, invertiert).