Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,10 € per l'ecotassa
Il servomotore Dynamixel XH540-W270-R sviluppa una coppia potente e offre un'ampia gamma di opzioni di controllo per i robotisti più esigenti e gli appassionati di veicoli fuoristrada.
Questo servomotore Dynamixel ha un rapporto di riduzione di 275:1, che lo rende ideale per i veicoli robotici progettati per esplorare terreni difficili. È più lento del modello XH540-W150-R , ma ha una coppia più potente.
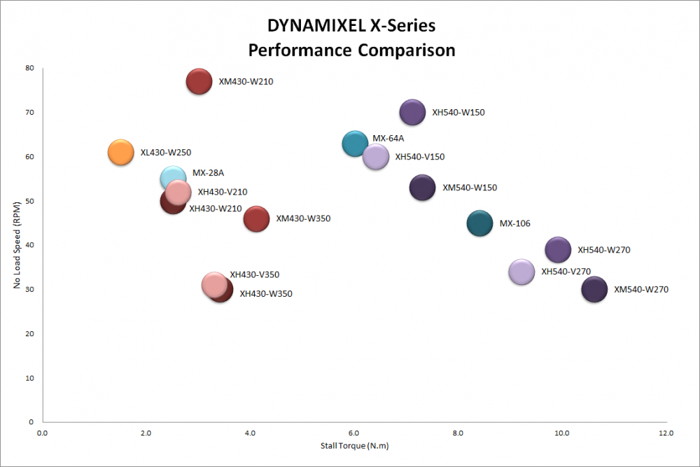
Prestazioni dei servomotori Dynamixel serie X
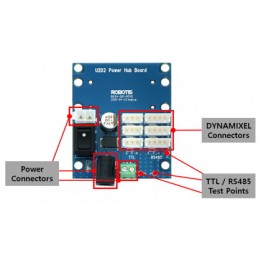
Come sempre con la serie XH , con questo servomotore Robotis si ottiene un dispositivo all-in-one che richiede solo una connessione al controllore o a un modulo Dynamixel U2D2 e un'alimentazione, per un funzionamento immediato. Programmabile al 100%, offre un controllo esteso di coppia, posizione, velocità e PWM, con 6 modalità di controllo in tutto. Per collegarlo al suo controllore, utilizzare il cavo JST/Molex in dotazione. Il servomotore Dynamixel XH540-W270-R è dotato di un nuovo connettore JST placcato in oro, molto più affidabile del connettore Molex utilizzato sui modelli precedenti.
Il servomotore Dynamixel XH540-W270-R presenta anche un design di alta qualità, che comprende un alloggiamento in metallo prezioso e plastica ingegnerizzata per una migliore dissipazione del calore.
Sul retro dell'attuatore è possibile scegliere tra 3 diverse configurazioni per il posizionamento del cavo di collegamento. Inoltre, utilizzando le apposite staffe, è possibile montare il servomotore Dynamixel in un'ampia gamma di configurazioni, una caratteristica particolarmente utile se si sta progettando un progetto robotico complesso.
Infine, il servomotore Dynamixel XH540-W270-R consente di montare una moltitudine di servi in catena.

Ecco tutte le risorse necessarie per ottenere il massimo dal servomotore Dynamixel XH540-W270-R.
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel XH540-W270-R sviluppa una coppia potente e offre un'ampia gamma di opzioni di controllo per i robotisti più esigenti e gli appassionati di veicoli fuoristrada.