Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 0,10 € für die Ökosteuer
Der Servomotor Dynamixel XH540-W270-R entwickelt ein starkes Drehmoment und bietet zahlreiche Steueroptionen für anspruchsvolle Robotiker und Liebhaber von Geländefahrzeugen.
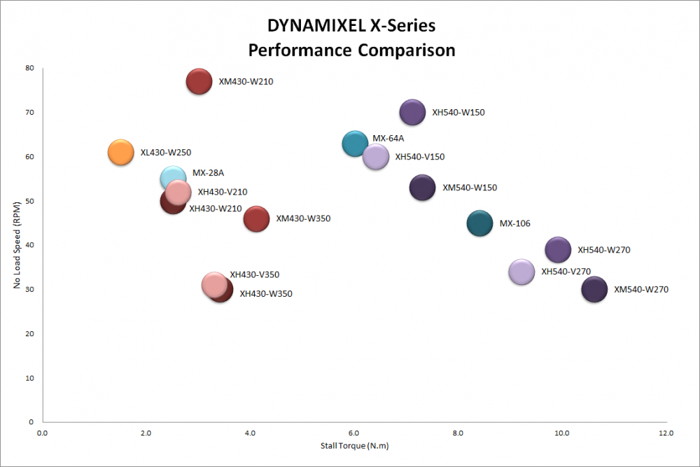
Dieser Dynamixel Servomotor bietet ein Untersetzungsverhältnis von 275:1, wodurch er sich problemlos für Roboterfahrzeuge für die Exploration in schwierigem Gelände eignet. Er ist zwar weniger schnell als das Modell XH540-W150-R, jedoch mit einem stärkeren Drehmoment ausgestattet.
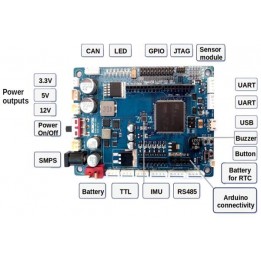
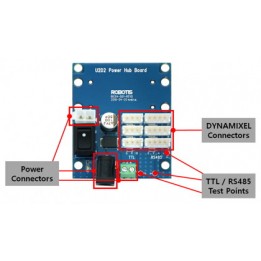
Wie immer bei der Serie XH handelt es sich auch bei diesem Robotis Servomotor um ein Komplettgerät, das nur einen Anschluss an Ihren Controller oder ein U2D2 Dynamixel-Modul sowie eine Stromversorgung benötigt, um sofort einsatzfähig zu sein. Er ist zu 100 % programmierbar und bietet eine erweiterte Steuerung des Drehmoments, der Position, der Geschwindigkeit und des PWM mit insgesamt sechs Steuermodi. Verwenden Sie das mitgelieferte JST/Molex-Kabel, um den Servo an seinen Controller anzuschließen. Der Servomotor Dynamixel XH540-W270-R verfügt nämlich über einen neuartigen, vergoldeten JST-kompatiblen Stecker, der wesentlich zuverlässiger ist als der Molex-Steckverbinder früherer Modelle.
Der Servomotor Dynamixel XH540-W270-R bietet außerdem eine hohe Entwicklungsqualität, darunter ein Gehäuse aus Edelmetall und technischem Kunststoff, der als Kühlkörper fungiert.
Hinten am Servomotor sind drei verschiedene Konfigurationen für die Positionierung des Verbindungskabels vorhanden. Mit den geeigneten Halterungen können Sie Ihren Dynamixel Servomotor außerdem in zahlreichen Konfigurationen montieren - ein besonders nützlicher Vorteil, wenn Sie die Umsetzung eines komplexen Roboterprojekts planen.
Der Servomotor Dynamixel XH540-W270-R ermöglicht auch die Montage einer Reihe von Servos per Daisy Chain.

Nachstehend finden Sie alle nötigen Ressourcen, um Ihren Servomotor Dynamixel XH540-W270-R optimal einzusetzen.
Vergewissern Sie sich, dass der Dynamixel Servomotor richtig konfiguriert ist. Flashen Sie den Motor nochmal mit der Roboplus Software und konfigurieren Sie ihn erneut. Wenn das Problem weiterhin besteht, kontaktieren Sie uns.
Der Servomotor ist vermutlich schlecht montiert. Vergewissern Sie sich, das dieser gut verschraubt ist und das Servorad richtig sitzt (Punkt auf der Axe und auf der Innenseite des Servorades)
Der Dynamixel Servomotor hat sehr wahrscheinlich ein mechanisches Problem. Bitte kontaktieren Sie unseren technischen Support.
Überprüfen Sie die Stromversorgung und die Anschlüsse (zum Beispiel mit einem anderen Motor). Reinitialisieren Sie Ihren Servomotor Dynamixel. Falls das Problem weiterhin besteht, folgen Sie der Checkliste auf der Seite des Herstellers.
Das 1.0-Protokoll ist spezifisch für die Dynamixel AX- und MX-Serie. Protokoll 2.0 wurde mit der neuen X-Serie und Dynamixel Pro entwickelt. Die Steuertabellen des Protokolls 2.0 enthalten PID-Regler für eine äußerst präzise Einstellung der Servobewegungen. Die Firmware der Servos der MX-Serie kann für die Verwendung von Protokoll 2.0 aktualisiert werden. Weitere Informationen finden Sie auf den Seiten Protokoll 1.0 und Protokoll 2.0.

Der Servomotor Dynamixel XH540-W270-R entwickelt ein starkes Drehmoment und bietet zahlreiche Steueroptionen für anspruchsvolle Robotiker und Liebhaber von Geländefahrzeugen.