Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,01 € per l'ecotassa
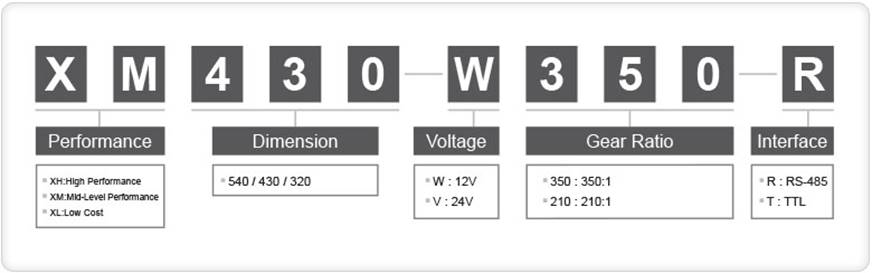
Il segreto delle piattaforme robotiche articolate più innovative? Un progettista di talento (siamo bravi in questo!) e servomotori ad alte prestazioni, come il servomotore XH430-W350-R, l'ultimo nato dello studio Robotis!
Novità di Robotis, i servomotori Dynamixel della serie XH (H per High-Performance) consentono di aumentare il controllo del movimento, della posizione e della velocità del robot. Questi servomotori Robotis offrono ben 6 modalità operative:
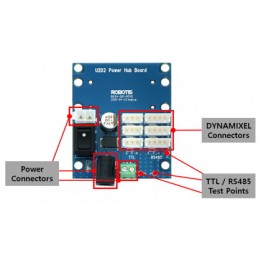
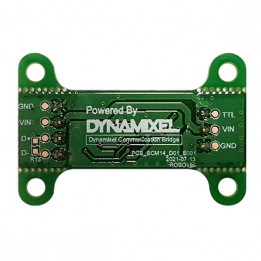
Robotis ha inoltre fornito un'esclusiva tabella di controllo avanzata per controllare e modificare un'ampia gamma di dati. È possibile accedere a questa tabella di controllo da Windows, Mac o Linux con un modulo USB2Dynamixel o un microcontrollore adatto (vedere sotto):
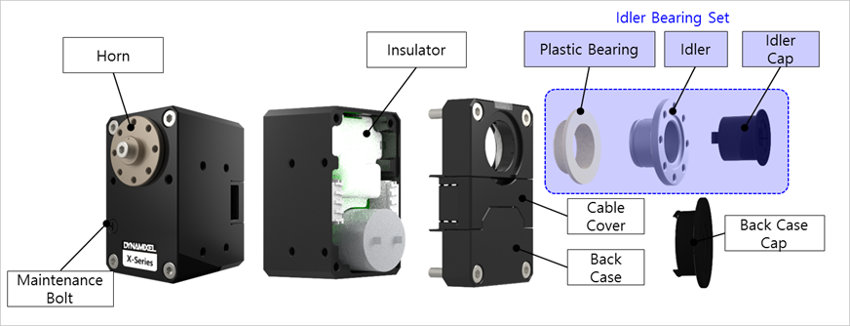
Il servomotore Dynamixel XH ha un design robusto ma compatto, molto più efficiente dal punto di vista energetico, e amplia le opzioni di progettazione offrendo 3 diversi modi di posizionare i cavi di collegamento e limitando l'inconveniente causato dai cavi quando il servomotore è in funzione. Allo stesso modo, sono disponibili diverse configurazioni per il montaggio dell'attuatore sulla sua struttura articolata.

Non vedete l'ora di provare il tuo servomotore Dynamixel XH? Allora prendetevi qualche minuto per dare un'occhiata a questi utili link!
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il segreto delle piattaforme robotiche articolate più innovative? Un progettista di talento (siamo bravi in questo!) e servomotori ad alte prestazioni, come il servomotore XH430-W350-R, l'ultimo nato dello studio Robotis!