Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Questa scheda di controllo open source è il controller ideale per il tuo robot TurtleBot3: un controller per ROS dotato di un processore ARM Cortex-M7, in grado di gestire i tuoi servi Dynamixel e molti altri moduli!
La scheda OpenCR 1.0 può essere utilizzata sia come controllore di robot open source (per TurtleBot3 per esempio), piuttosto che come microcontrollore con il suo processore a 32 bit con FPU, clockato a 216 MHz. Questo significa che avrai accesso a tutto il codice di programmazione, agli schemi, al software e all'hardware progettati per la piattaforma educativa TurtleBot 3.
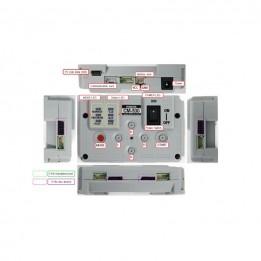
Questo robocontroller e microcontroller open source supporta la comunicazione RS-485 e TTL (per i servi Dynamixel R e T), oltre ai protocolli UART e CAN. Inoltre, incorpora un circuito USB e un connettore GPIO a 18 pin per sviluppare il tuo progetto.
Oltre alla possibilità di collegare numerosi moduli periferici alla tua scheda ROS, la scheda OpenCR 1.0 integra un'unità di movimento inerziale a 9 assi (giroscopio, accelerometro e magnetometro a 3 assi) per un migliore controllo della posizione, della rotazione, dell'altitudine e della velocità del tuo robot mobile. 2 pulsanti e 4 LED utente completano questo quadro già di per sé allettante, oltre a un'uscita LED rosso/verde per indicare lo stato della comunicazione USB.
Include:
Hai bisogno di maggiori informazioni sul tuo controller OpenCR 1.0? Non muoverti, sono tutte qui!

Questa scheda di controllo open source è il controller ideale per il tuo robot TurtleBot3: un controller per ROS dotato di un processore ARM Cortex-M7, in grado di gestire i tuoi servi Dynamixel e molti altri moduli!