

Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Il servomotore Dynamixel M42P-010-S260-R con connessione RS485 fa parte della serie Dynamixel-P progettata da Robotis. Ancora più preciso e potente, offre un design e una durata migliori.
Completamente programmabile, il servomotore Dynamixel-P M42P-010-S260-R è composto da un motore DC, un riduttore, un controllore, un driver e una rete. Offre ampie possibilità in termini di controllo e feedback e si distingue come servo d'eccellenza, anche grazie al suo motore Maxon di alta qualità.
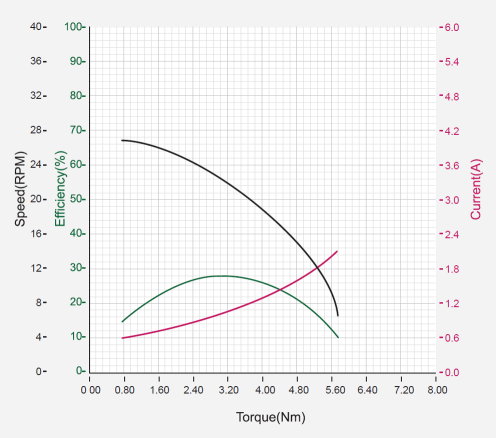
In particolare, il servomotore M42P-010-S260-R incorpora il controllo della coppia utilizzando la misurazione della corrente e la tabella di controllo X series e consente di controllare la coppia, la velocità o anche la posizione. La combinazione di un encoder assoluto senza contatto e di un encoder incrementale gli conferisce un'accuratezza superiore.
Questa versione rivista del M42-010-S260-R include nuovi miglioramenti, in particolare per quanto riguarda l'architettura del gruppo motoriduttore:
Il servomotore Dynamixel M42P-010-S260-R è stato inoltre progettato per ridurre il suo tempo di risposta, rendendo questo modulo una risorsa preziosa per tutti i tipi di applicazioni robotiche: veloce, preciso, scalabile e durevole.
Trova qui la documentazione completa che ti permetterà di padroneggiare il tuo servomotore Dynamixel M42P-010-S260-R in tempo record:
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel M42P-010-S260-R con connessione RS485 fa parte della serie Dynamixel-P progettata da Robotis. Ancora più preciso e potente, offre un design e una durata migliori.















