Roboterarme
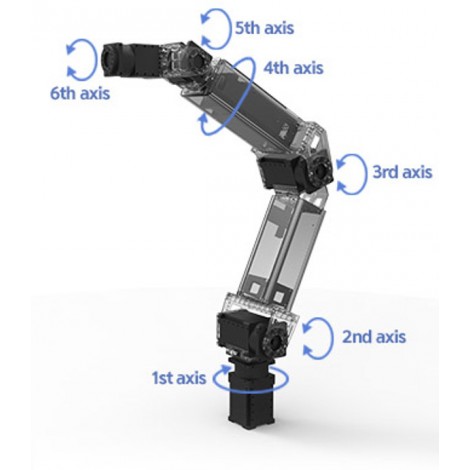
Roboterarme, die auch als Manipulationsroboter bezeichnet werden, bestehen aus mehreren Gelenkachsen, mit denen sie sich in alle Richtungen bewegen können. Sie werden in der Regel mithilfe spezieller Software für die Ausführung bestimmter Aufgaben programmiert und können von menschlichen Bedienern über eine Benutzeroberfläche gesteuert werden. Sie können in vielen Bereichen eingesetzt werden und verfügen über eine höhere Genauigkeit, die eine Steigerung der Produktivität und Qualität, eine Senkung der Kosten und eine Verbesserung der Sicherheit für die Arbeiter ermöglicht.
Kollaborative Arme (Cobots): Roboter, die für die Zusammenarbeit mit Menschen konzipiert sind.
Kollaborative Arme, auch "Cobots" genannt, sind Roboter, die so konstruiert sind, dass sie in einer Arbeitsumgebung sicher mit Menschen zusammenarbeiten können. Sie sind mit fortschrittlichen Sensoren und Technologien wie Kraftsensoren, Näherungssensoren und Kameras ausgestattet, die es ihnen ermöglichen, die Anwesenheit von Menschen zu erkennen und sicher und effizient mit Menschen zu interagieren.
Génération Robots ist offizieller Vertriebspartner von Bras Doosan Robotics und FRANKA EMIKA, zwei der fortschrittlichsten Marken in den Bereichen Industrie und Forschung. Die meisten unserer kollaborativen Roboter sind ROS-kompatibel.
Alle unsere Roboterarme haben den Vorteil, dass sie auf alle unsere mobilen Roboter passen.
Doosan Robotics: Roboterarme für die industrielle Automatisierung
Doosan Robotics stellt kollaborative Arme her, die mit menschlichen Arbeitern in verschiedenen Branchen zusammenarbeiten können, u. a. in der Automobil-, Elektronikund Logistikbranche.
Die Marke bietet eine Reihe von 10 kollaborativen Robotern mit unterschiedlichen technischen Eigenschaften an:
- SERIE-A: Die wettbewerbsfähigste Produktreihe auf dem Markt mit einer Nutzlastkapazität von 6 kg bis 15 kg.
- SERIE-M: Kleine Cobots mit geringer Nutzlast (3 bis 5 kg), die so konzipiert sind, dass sie sich leicht in enge Arbeitsbereiche integrieren lassen.
- SERIE-H: Großraumfahrzeuge mit Nutzlastkapazitäten von 6 kg bis 20 kg, die zum Palettieren und Transportieren verwendet werden.
Franka Research 3: Ein kollaborativer Roboter für Forschung und Entwicklung
Der FR3-Roboterarm von FRANKA EMIKA verfügt über 7 Freiheitsgrade, was ihm eine sehr hohe Nachgiebigkeit verleiht. Er wurde für die Forschung und für F&E-Zentren konzipiert , ist einfach zu erlernen: Es kann programmiert und mit externen Sensoren verbunden werden (Pakete und Bibliotheken für ROS, ROS2, MoveIt! und Matlab)
Baxter: ein Roboter mit zwei Manipulatorarmen
Der Baxter-Roboter von Rethink Robotics zeichnet sich dadurch aus, dass er mit zwei Manipulatorarmen mit jeweils sieben Bewegungsachsen ausgestattet ist, die eine große Bewegungsflexibilität bieten. Ausgestattet mit einem integrierten Touchscreen können die Benutzer den Roboter mithilfe verschiedener Sprachen (Python, ROS etc.) programmieren und seine Aktionen visualisieren.
Kleine Roboterarme für Bildung, Forschung und Industrie
Kleine kollaborative Arme sind leichte, kompakte Roboter, die sich ideal für enge Arbeitsbereiche und Präzisionsaufgaben eignen (Manipulation, Montage und pick-and-place). Sie sind kleiner als Industrieroboterarme und können mithilfe einer intuitiven Benutzeroberfläche einfach programmiert werden.
Sechsachsiger Arm Nyrio: ein kollaborativer Roboter für Bildung und Forschung
Der Roboterarm NED 2 ist eine Miniaturversion der Roboterarme in großen Fertigungsstraßen. Dieser kollaborative 6-achsige Roboter made in France ist OpenSource und kann mit Blockly, Python, C++, Matlab und über eine SPS programmiert werden. Er richtet sich an Lehrer, Forscher und die Welt der Industrie 4.0.
Interbotix: Open-Source-Roboterarme, die wenig kosten
Die Roboterarme von Trossen Robotics sind mit Dynamixel-Servomotoren ausgestattet, die eine hohe Bewegungspräzision ermöglichen. Diese für Bildung und Forschung konzipierten Roboterarme sind in verschiedenen Modellen erhältlich: 4,5 oder 6 Freiheitsgrade mit Nutzlasten von 50 bis 750 Gramm. ROS- und ROS2-kompatibel, sind alle Arme Open-Source und ermöglichen das Erlernen von künstlicher Intelligenz sowie Automatisierung.





















Angetrieben von sechs intelligenten Dynamixel Servomotoren bietet der Roboterarm WidowX große Wendigkeit und ein hohes Drehmoment.


Dieser Bausatz für den OpenManipulator RM-X52 wird Ihnen hier mit den passenden Servomotoren angeboten. Damit sind Sie in der Lage, eine neue Funktion zu Ihrer Roboterplattform Turtlebot 3 Waffle oder Waffle Pi hinzuzufügen.


Mit dem Sockel kann die Sawyer und Baxter Roboter auf einer bestimmten Höhe fixiert und bei Bedarf problemlos verschoben werden.


Ein mehrachsiger Roboterarm, der perfekt das Gleichgewicht zwischen Leistung und Größe hält.


Der kollaborative Arm 850 ist einer der leistungsstärksten Roboter mit industrietauglicher Leistung.

Der ROS-kompatibel Roboterarm ROBOTIS OpenManipulator-Pro wird Sie nicht nur mit seiner Robustheit und Kraft beeindrucken, sondern auch mit seiner Präzision und seinem Geschick. Dadurch ist eine supergenaue Steuerung sekbst der geringsten Bewegung möglich. Auch die umfassende Programmierschnittstelle ist ein deutliches Plus.


Stationary AI ist eine All-in-One-Roboter-Workstation für Datenerfassung, KI-Modelltraining und komplexe Manipulationsexperimente. Ausgestattet mit vier WidowX AI Roboterarmen ist sie sofort einsatzbereit.

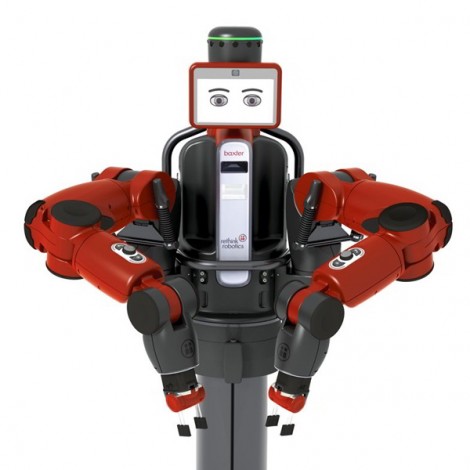
Die Version für Forschung und Lehre des berühmten Baxter Roboters von Rodney Brooks ist eine ideale Basis für zahlreiche Projekte. Zu den Anwendungsbereichen zählen Informatik, künstliche Intelligenz, Mensch-Technik-Interaktivität, Steuer- und Regeltechnik, Erkennung und Manipulation von Gegenständen, Lehre ...


Schnell, präzise und wettbewerbsfähig, zeichnet sich der Roboterarm A0912 von Doosan Robotics durch seine Betriebsgeschwindigkeit aus. Mit seiner Nutzlast von 9 kg, seiner Reichweite von 1200 mm und seiner Wiederholbarkeit von +/- 0,05 mm wurde dieses Modell speziell zur Materialhandhabung und Qualitätskontrolle entwickelt.