")
")
")
Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 0,38 € für die Ökosteuer
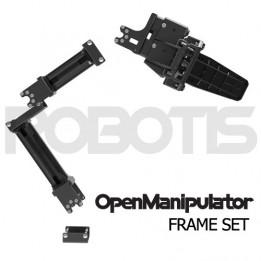
Dieser Bausatz für den OpenManipulator RM-X52 wird Ihnen hier mit den passenden Servomotoren angeboten. Damit sind Sie in der Lage, eine neue Funktion zu Ihrer Roboterplattform Turtlebot 3 Waffle oder Waffle Pi hinzuzufügen.
Dieser ROS-kompatibel Roboterarm wurde als Kompaktversion des OpenManipulator RM-X52 entwickelt, eines der Turtlebot 3 Zubehörteile, mit dem Sie den Funktionsumfang Ihrer mobilen Plattform erweitern können. Er wird Ihnen hier im Bausatz angeboten, mit allen notwendigen Mechanikteilen und Werkzeugen. Dazu zählen auch 5 kompatible Servomotoren Dynamixel mit TTL-Kommunikation, um die 5 verfügbaren Gelenke zu bewegen.
Bei einem Eigengewicht von 700 g kann dieser OpenManipulator dank der Nutzlast seiner Servos Gegenstände bis 500 g bewegen. Der Greifer kann Gegenstände unterschiedlicher Größe erfassen (2-7,5 cm breit).
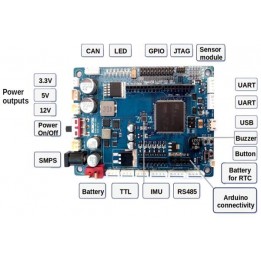
Dieser Manipulator kann problemlos auf einem Turtlebot3 Waffle Pi oder einem Turtlebot3 Waffle mit OpenCR Controller installiert werden. Er wird auf demselben Wege direkt programmiert oder aber an den PC angeschlossen (mit dem dem U2D2 Dynamixel/PC Stecker). Für die Parametrierung stehen der Quellcode und die Entwicklungsumgebung zur Verfügung.
OpenManipulator ist zu 100 % Open-Source, sodass Sie Ihre eigenen Anwendungen entwickeln, kostenlose Software installieren oder über die Inventor's Community Lösungen für Ihre Probleme finden können.
")
Dieser Bausatz für den OpenManipulator RM-X52 wird Ihnen hier mit den passenden Servomotoren angeboten. Damit sind Sie in der Lage, eine neue Funktion zu Ihrer Roboterplattform Turtlebot 3 Waffle oder Waffle Pi hinzuzufügen.