")
")
")
")
")
")
")
")
")
")
Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.



Es bestehen hier zwei Versionen: Die Standard-Version und die Version Performance, die mehr leistungsfähig ist. Die folgenden technischen Angaben sind für die jeweilige Version:
| Standard version | Performance version | ||
| Intel i3-4330TE | Dual core, 2.4GHz | Intel Core i5 4570TE | Dual core, 2.7GHz |
| 4 GB RAM | 120 GB Hard Drive | 8 GB RAM | 128GB Hard Drive |
| WIFI Adapter | WIFI Adapter | ||
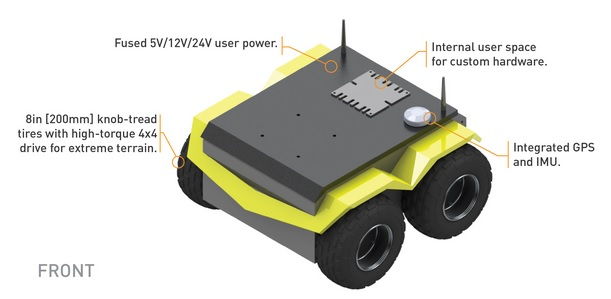
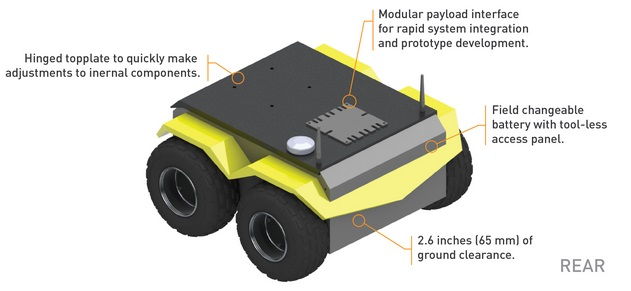
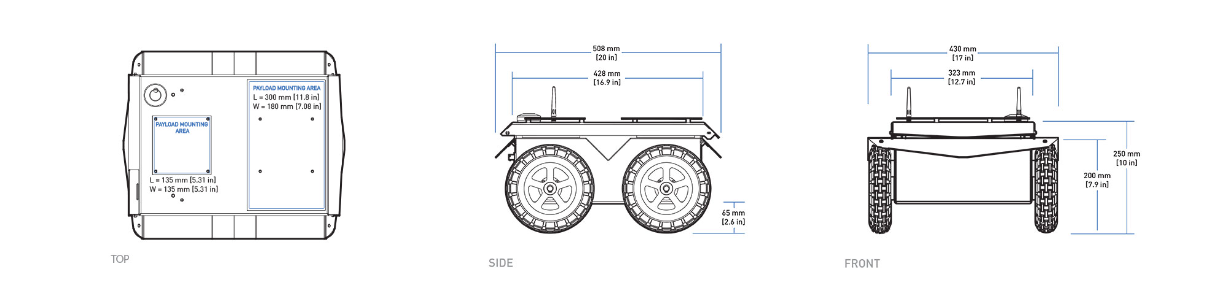
Um Ihnen den Einstieg mit dem mobilen Roboter ROS Jackal von Clearpath Electronics zu erleichtern, stellen wir Ihnen in der Folge einige zusätzliche Informationen zur Verfügung:
Der folgende Link führt zu den technischen Spezifikationen von Jackal.
")