Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Dont 0,01 € d'éco-participation
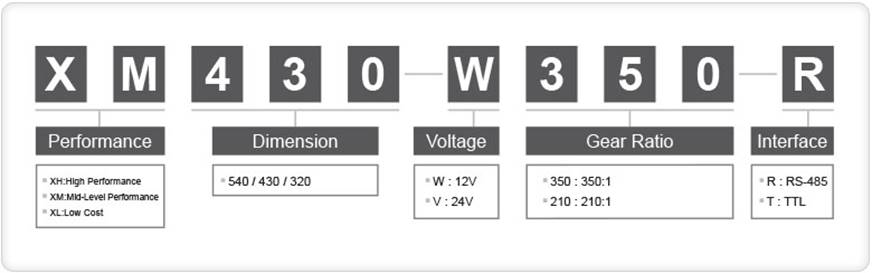
Le secret des plateformes robotiques articulées les plus innovantes ? Un concepteur talentueux (là, on est bon !), et des servomoteurs haute-performance, tels que le servomoteur XH430-W350-R, dernier-né du studio Robotis !
Nouveaux chez Robotis, les servomoteurs Dynamixel de la série XH (H pour Haute-performance) relèvent encore d'un cran les possibilités de contrôle du mouvement, de la position ou encore de la vitesse de votre robot. Ces servomoteurs Robotis offrent en effet pas moins de 6 modes de fonctionnement :
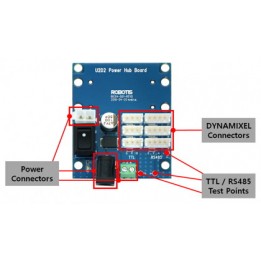
Robotis a également prévu une table de contrôle avancé exclusive permettant de contrôler et de modifier une vaste gamme de données. Cette table de contrôle est accessible depuis Windows, Mac ou Linux avec un module USB2Dynamixel ou un microcontrôleur adapté (voir ci-dessous) :
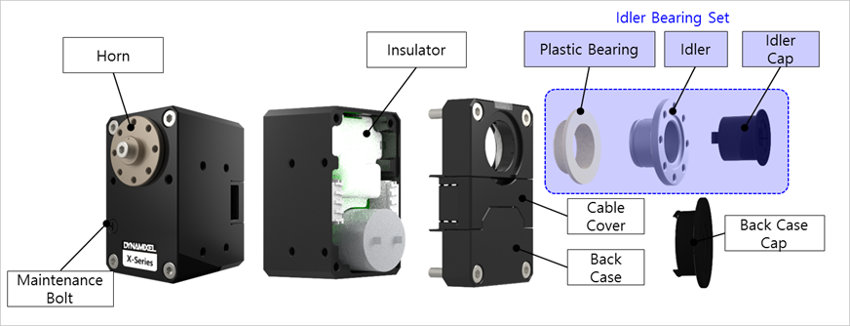
De conception robuste mais au format très compact, beaucoup plus économe en énergie, le servomoteur Dynamixel XH étend également vos possibilités de conception en vous offrant 3 façons différentes de positionner les câbles de connexion et en limitant la gêne occasionnée par les câbles quand le servomoteur est en marche. De même, il existe de multiples configurations pour le montage de votre servomoteur sur sa structure articulée.

Vous êtes impatient de tester votre servomoteur Dynamixel XH ? Prenez tout de même quelques minutes pour consulter ces liens utiles !
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le secret des plateformes robotiques articulées les plus innovantes ? Un concepteur talentueux (là, on est bon !), et des servomoteurs haute-performance, tels que le servomoteur XH430-W350-R, dernier-né du studio Robotis !