Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,05 € per l'ecotassa
Il servomotore Dynamixel XM540-W150-R appartiene alla stessa famiglia dei servomotori Robotis della serie X: può essere aggiornato e offre ben 6 modalità operative per un controllo preciso dei movimenti del robot.
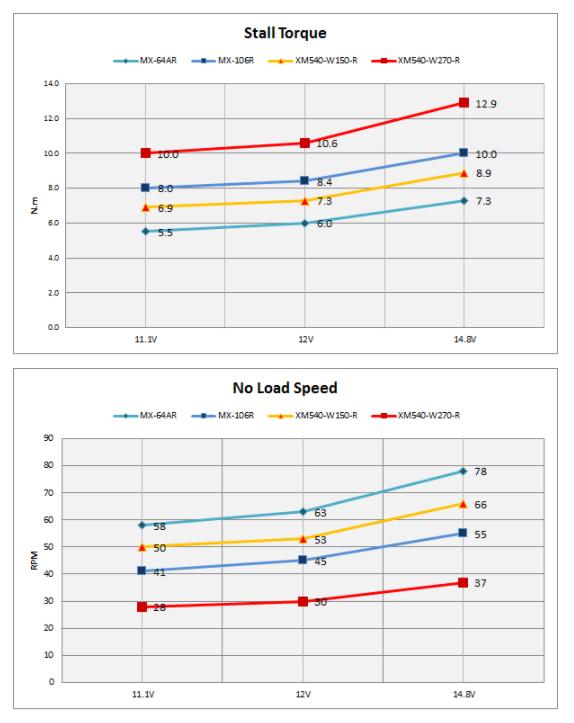
Con una velocità a vuoto di 53 giri/min a 12 V, il servomotore Robotis XM540-W150-R è uno dei servomotori più veloci del marchio. Offre l'accesso a 6 modalità di controllo:
Il feedback è inoltre molto completo e comprende informazioni su stato di carica, posizione, velocità, temperatura, potenza, traiettoria, tensione di ingresso e così via. Caratteristiche ideali se si cercano servomotori di qualità per equipaggiare un robot con articolazioni complesse.
Da un punto di vista puramente hardware, questa nuova serie di servomotori Dynamixel offre una serie di vantaggi: un involucro in alluminio per favorire la dissipazione del calore, uno sportello sul retro dell'involucro per proteggere i cavi e limitare così le sollecitazioni, e soprattutto una serie di opzioni di cablaggio per collegare il servomotore nel modo più ergonomico.

Confronti di prestazioni, diagrammi tecnici, download di software, SDK e IDE... l'elenco dei link utili per il servomotore XM540-W150-R è lungo, quindi abbiamo scelto di riunirli tutti qui!
(
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel XM540-W150-R appartiene alla stessa famiglia dei servomotori Robotis della serie X: può essere aggiornato e offre ben 6 modalità operative per un controllo preciso dei movimenti del robot.