")
")
")
Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Including €0.92 for ecotax
![]()
Poppy is an open-source platform for the creation, use and sharing of interactive robotic objects. It addresses both beginners and experts in the fields of education, science, art, more generally makers. The Poppy platform has been designed as a learning tool to create and share ideas on digital technologies.
The Poppy technology consists of open-source hardware models (CC-BY-SA), an open-source software library named Pypot based on the Python language, and finally a community website where everyone can access the documentation , tutorials, software and simulators, and contribute to improvements of the platform: http://www.poppy-project.org .
Poppy is a platform to create any kind of creatures and other robots. To date, the founders of the Poppy project propose three creatures but you can also design your own robot using this platform. The three creatures are:
The Poppy ecosystem, originally developed by the FLOWERS team of French lab INRIA was transferred in 2018 to the association Poppy Station .
Generation Robots, historical distributor of the Poppy robots, is founder partner of Poppy Station.
Poppy Torso is the same robot as Poppy Humanoid, but without the legs. Poppy Torso is more affordable than the full kit (Poppy Humanoid), which makes it especially suitable for some users such as robotics associations or the makers.
The Cherry Project is a great use case of the Poppy platform, head and torso version. This project has been created by 4 students at ENSEIRB-MATMECA Bordeaux school.
Its goal : providing an innovative solution to the hospitalised children’s schooling issue.
The below video is a demonstration Poppy Torso for the Cherry Project :
The robot is open source for both hardware and software. It is possible to design variations and develop according to your needs whether scientific, educational or artistic.
The Poppy project aims to enable everyone to understand and participate in the creation of the digital world around us. The Poppy robot is a tool of choice for educators and teachers. It has been successfully used in high schools and engineering schools. The students, organized in groups, focus on specific goals (design of a new mechanical part, the construction of a leg, adding Arduino sensors, programming of a specific behavior ...). Then in a second step, in an integrative and collaborative process, they share skills and enrich each other.
Poppy robot is particularly suited to organizations promoting science and DIY such as FabLabs. Everyone can participate by sharing ideas, creations or even participating on the discussion platform: https://forum.poppy-project.org .
Timelapse of Poppy assembly
Using the Poppy platform you'll be able to share code and new robot design. The Poppy platform was designed to allow researchers to reproduce and share the results of another laboratory. In particular, the Poppy Humanoid robot, due to its modularity, can test several design as discussed in this article . The following video demonstrates how Poppy opens scientific possibilities to explore the mechanisms of learning and development:
|
3D printed parts |
A software programming library  The Pypot software library uses Python to program robots created using the Poppy platform. Poppy robots are visually programmable using SNAP! |
|
Models available for simulators 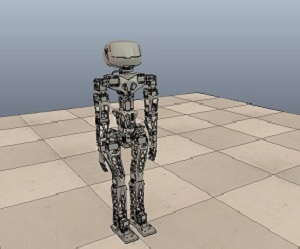 A Poppy robot model is available in simulation with V-Rep. Porting to Gazebo is underway. |
An active user community  The user community is growing every day, as evidenced by the activity of the forum and usages around the various Poppy robots. |
In addition to traditional programming in Python, it is possible to program the robot trough wifi from a simple Web browser via IPython.
The Poppy version introduced here (torso and head kit) does not include Poppy’s legs. Therefore this kit will be especially suitable for projects requiring a humanoid robot that does not need to move around.
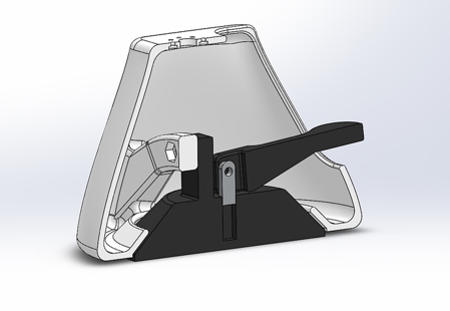
The torso is attached to a suction pad with lever arm to ensure the utmost stability. The suction pad and the fastening nuts are included in this kit. We also provide an additional 3D printed part to cover the suction pad and give a nice finishing touch to the robot!
Below is a cutaway drawing of the suction pad + 3D printed part device:
It has a Raspberry Pi 3 model B+ board in the head, to run your programs and communicate through WiFi and Ethernet. A camera located in the head can be used for artificial vision.
Poppy Torso robot comes unassembled. You'll find online video tutorials to assemble Poppy Humanoid. Please note that these videos are based on Odroid version of the robot, with Odroid XU4 board, instead of Raspberry. This previous version is no longer for sale. The assembly mostly differs for the head and connections to the board.
The list of equipment included in the kit is:
The shoes are not included, which gives you the liberty to choose your favorite pair for your robot! (Poppy's shoe size is 23).
The following resources will help you start the assembly and programming of Poppy Torso robot.
Please follow the Odroid installation instructions.
Please follow the instructions to connect to the web interface.
The robot must be connected to the same local network as the computer, using an ethernet cable. If the Poppy robot is directly connected to the computer, the network must be shared by the computer. For further information, follow this link.
They can be found in the Easy and recommended way: use the Poppy SD-card paragraph. Just follow this link.
The detailed documentation for the preparation of a Poppy robot can be found on this link.
You may find information on the Poppy forum. If your problems remains, please contact us. The forum can be found on this link.
")






















