




















































La serie DOBOT CRAF comprende cobot a 6 assi con portata da 5 a 20 kg (CR5AF, CR10AF, CR20AF), progettati per applicazioni in cui il controllo di forza fa la differenza: assemblaggio di precisione, lucidatura / smerigliatura, operazioni a contatto e scenari avanzati di collaborazione.


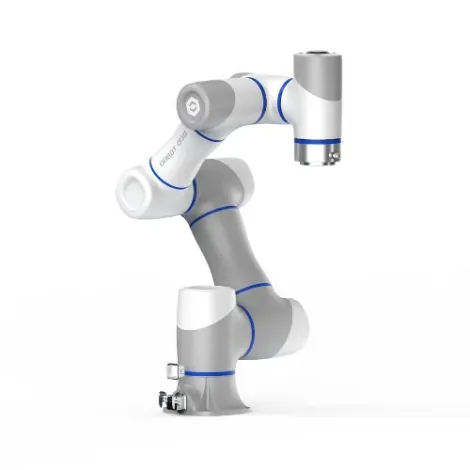
Il DOBOT Nova 5 è un braccio robotico industriale ultra-compatto (6 assi) pensato per la light industry e per integrazioni in spazi ridotti.

La serie DOBOT CRA comprende cobot a 6 assi con portata da 3 a 20 kg, progettati per automatizzare rapidamente attività industriali (movimentazione, assemblaggio, carico/scarico CNC, saldatura, pallettizzazione, ecc.).


Il Dobot CR 30H è un braccio robotico collaborativo a 6 assi progettato per scenari con elevata portata (30 kg) e grande raggio d’azione (1800 mm). È pensato per movimentazione, carico/scarico e pallettizzazione.


Unitree R1 Edu è una piattaforma umanoide per R&S e didattica incentrata su locomozione, manipolazione e IA a bordo, con accesso alla programmazione di alto e basso livello e alla simulazione (ad es. Isaac Sim).


Raph Rover è un robot mobile compatto progettato come piattaforma di R&S per progetti di robotica autonoma, con architettura open-source e integrazione nativa ROS 2.


Questo telaio per robot mobile per ambienti indoor/outdoor misti funge da base per la ricerca, la didattica e l’integrazione di sistemi umanoidi o di collaborazione intelligente.


Unitree A2-W è un robot quadrupede con ruote progettato per muoversi su terreni irregolari, trasportare carichi e integrare sensori per ispezione, logistica o ricerca, in ambienti interni ed esterni.

Unitree A2 è progettato per muoversi su terreni irregolari, trasportare carichi e integrare sensori per ispezione, logistica o ricerca, in ambienti interni ed esterni.


Il Go2X è il modello ideale se desideri integrare il tuo PC (mini-PC, stazione di calcolo, configurazione GPU specifica) e costruire un’architettura hardware e software adatta al tuo progetto.


Il Unitree GO2-W è un robot quadrupede su ruote destinato a team che sviluppano e testano funzioni di mobilità, percezione e IA a bordo. Questa base robusta è pensata per ambienti impegnativi.

Il RB-WATCHER XL è un robot mobile autonomo progettato per missioni di ispezione e sorveglianza in ambiente esterno. È orientato alla mobilità fuoristrada, alla robustezza e a un’autonomia estesa per operazioni regolari sul campo.



Il RB-WATCHER è un robot mobile autonomo progettato per svolgere missioni di ispezione e pattugliamento in ambienti indoor e outdoor. Combina sensori di visione, termici e di navigazione per rilevare anomalie e monitorare asset critici.


Il RB-ROBOUT+ è un manipolatore mobile collaborativo progettato per automatizzare operazioni di manipolazione in interno, con un braccio Universal Robots e una base onnidirezionale adatta a spazi ristretti.


Il RB-ROBOUT è un robot mobile autonomo (AMR) progettato per il trasporto indoor di carichi pesanti, fino a 2 tonnellate, in ambienti industriali come fabbriche e magazzini.

Il RB-KAIROS è un robot mobile autonomo (AMR) progettato per applicazioni indoor di logistica e trasporto, con portata fino a 250 kg, cinematica onnidirezionale e architettura basata su ROS 2.


Il RB-FIQUS è un robot mobile outdoor progettato per il trasporto e la movimentazione di carichi elevati, con un’architettura modulare, cinematica onnidirezionale e un controller basato su ROS 2.


Il RB-THERON+ è un robot mobile manipolatore progettato per attività di R&D e operazioni di manipolazione in interno, adatto a laboratori, università, siti industriali e aree logistiche con vincoli di spazio.


Il RB-SUMMIT+ è un manipolatore mobile autonomo progettato per attività di R&D in laboratori, centri di ricerca e ambienti accademici, sia in interno che in esterno. Architettura ROS 2 aperta e modulare.


Il Nero è un braccio robotico a 7 assi (7-DoF) pensato per attività di ricerca nella robotica umanoide e nell’Embodied AI. Il suo design leggero e l’architettura aperta facilitano l’integrazione in laboratorio, la sperimentazione e l’installazione in diverse configurazioni (da tavolo, laterale, invertita).


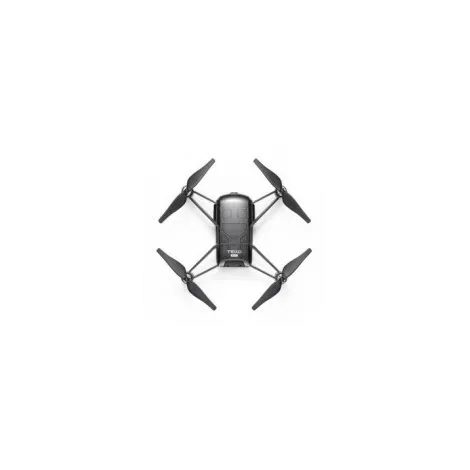
Il Crazyflie 2.1+ Brushless è un micro drone open source per sperimentare nella robotica aerea, nella didattica e nella ricerca.


Il Crazyflie 2.1+ rappresenta una base solida per progettare, testare e documentare progetti di robotica aerea, sia in ambito accademico sia in laboratori di R&S.


La TOTL Workstation di Trossen Robotics è una workstation ad alte prestazioni con Ubuntu, dotata di una GPU NVIDIA RTX 5090 da 32 GB, pensata per workflow di machine learning, IA e robotica.


Questo pacchetto Bunker Mini 2.0 con kit R&D ROS 2 è pronto all’uso e ti permette di avviare rapidamente i tuoi progetti di navigazione e SLAM.