Holen Sie Ihr Angebot in 3 Schritten ein!
1.Legen Sie die Artikel, an denen Sie interessiert sind, in Ihren Warenkorb
2.Gehen Sie zu Ihrem Warenkorb
3.Klicken Sie auf EIN ANGEBOT ERHALTEN
Tous vos devis sont accessibles à partir de votre compte client.
Einschließlich 0,05 € für die Ökosteuer

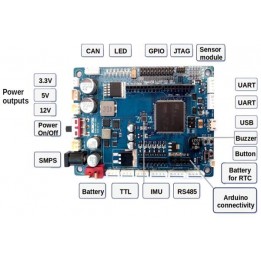
Der Controller CM-530 enthält einen Mikrocontroller ARM Cortex STM32F103RE, 3-Pin-Anschlüsse für die Kommunikation per TTL und 5-Pin-Anschlüsse für Peripheriegeräte (z.B. Sensoren). Er steuert Dynamixel Servomotoren der Baureihen MX-xxT (für den humanoiden Roboter DarwinOp – Achtung, die Servomotoren MX-xxR verwenden das Protokoll RS485) und AX (Bioloid-Sets). Er unterstützt die Kommunikation per Bluetooth und Zigbee.