














































Cette base de charge sans fil pour robot quadrupède Go2 EDU Plus permet de recharger le robot sans retirer la batterie .


Prévoyez une docking station pour votre Leo Rover pour vous parer à tous les besoins de votre robot terrestre !


Une plate-forme robotique télécommandée open source et intégrale, bénéficiant d’un matériel amélioré pour des performances optimales.


Le bureau d’études en ingénierie de Génération Robots (GR Lab) a développé un kit de recherche compatible ROS2, adaptable sur les bases AgileX, Clearpath et Husarion.

Le Unitree B2-W est un robot quadrupède à roues conçu pour des déplacements rapides, y compris sur terrains exigeants. Il intègre une protection IP67 et une perception basée sur LiDAR 3D et caméras.


Le Unitree B2 est un robot quadrupède industriel conçu pour évoluer sur des terrains variés, franchir des obstacles et monter des escaliers.


Le LIMO COBOT est une composition du LIMO PRO, une plateforme de développement et d'apprentissage ROS, équipé d’un bras robotique Mycobot 280.


Découvrez le Robot mobile ROSbot XL d’Husarion, une plateforme robotique mobile autonome conçue pour la Recherche et le Développement, le prototypage rapide et la création de robots sur mesure pour une variété d'applications en intérieur.



Panther est un UGV tout-terrain de qualité industrielle conçu pour des applications en extérieur. Il s’agit d’une plateforme robotique autonome et open-source fonctionnant avec ROS et ROS2.

Le chargeur de batterie Go2 d'Unitree Robotics est un accessoire essentiel conçu spécialement pour alimenter et recharger les robots quadrupèdes de la série Go2.

Améliorez l’autonomie de votre robot-chien Go2 Unitree Robotics en vous procurant une batterie supplémentaire !


Le bras robotique Servo d'Unitree peut coopérer avec le robot quadrupède Go2. Léger et compact, il permet au robot d’être encore plus performant.


Le Unitree Go2 Pro est un robot quadrupède grand public conçu pour l’interaction, la démonstration et le divertissement.


Le Unitree Go2 Air est un robot quadrupède grand public conçu pour l’interaction, la démonstration et le divertissement.


Disponible en 4 versions, le robot Go2 Edu Plus est un outil idéal pour la recherche, l’enseignement et la robotique. Il intègre l’intelligence artificielle et un LiDAR 4D avec vision hémisphérique.
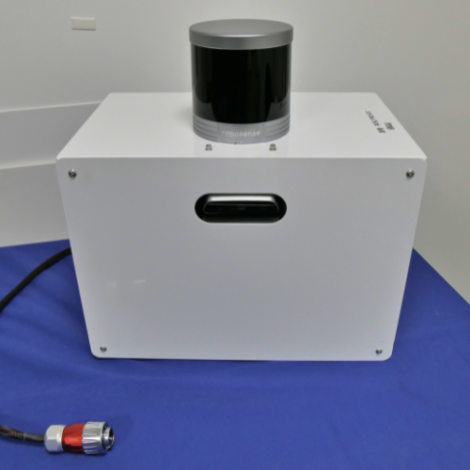
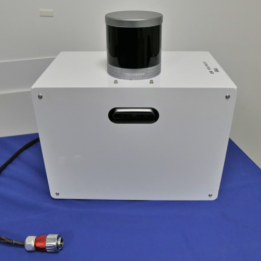
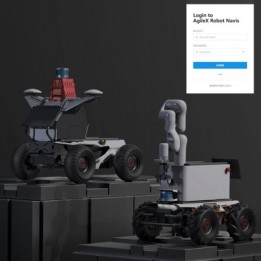
Navis est un système de navigation autonome compatible avec toutes les plateformes robotiques d’Agilex. Il est adapté pour des scénarios semi-fermés et entièrement fermés.


Découvrez LIMO, un robot mobile conçu sur la base d'une plateforme mobile Agilex. Cette structure robotisée évolutive est dédiée au développement d'intelligence artificielle. LIMO est disponible en 2 versions : LIMO et LIMO PRO (compatible ROS 2).


Le robot mobile du TurtleBot 4 est construit sur le robot éducatif iRobot® Create® 3 qui fournit un IMU, un capteur optique de suivi du sol et des encodeurs de roue pour un positionnement et une localisation précis.


Le robot mobile du TurtleBot 4 est construit sur le robot éducatif iRobot® Create® 3 qui fournit un IMU, un capteur optique de suivi du sol et des encodeurs de roue pour un positionnement et une localisation précis.


le robot mobile TEC800 est un UGV monté sur chenilles et pilotable à distance. Une plateforme puissante et personnalisable pour la Recherche et les pôles R&D souhaitant réaliser du développement d'applications robotiques.


Le Robot Ranger 4WS4WD est doté d'une configuration à quatre roues motrices et à quatre roues directrices, ce qui lui permet de se déplacer facilement sur des terrains accidentés et des surfaces inégales.


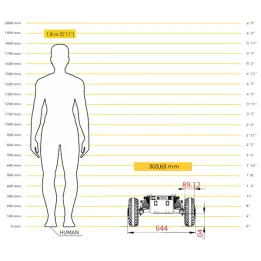
Avec son châssis omnidirectionnel Drive-by-wire, le Ranger Mini 3.0 d’AgileX est un robot mobile aux multiples modes de déplacement. ll est capable de gérer diverses missions en intérieur et en extérieur.

LIMO simulation table met à l'épreuve les capacités du robot LIMO à naviguer de façon indépendante et analyser les signaux qu'il trouvera sur sa route.

Robot d'exploration par excellence, Hunter SE est un châssis robotique conçu pour la vitesse et la distance notamment avec son système Ackermann pour la direction avant