



Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
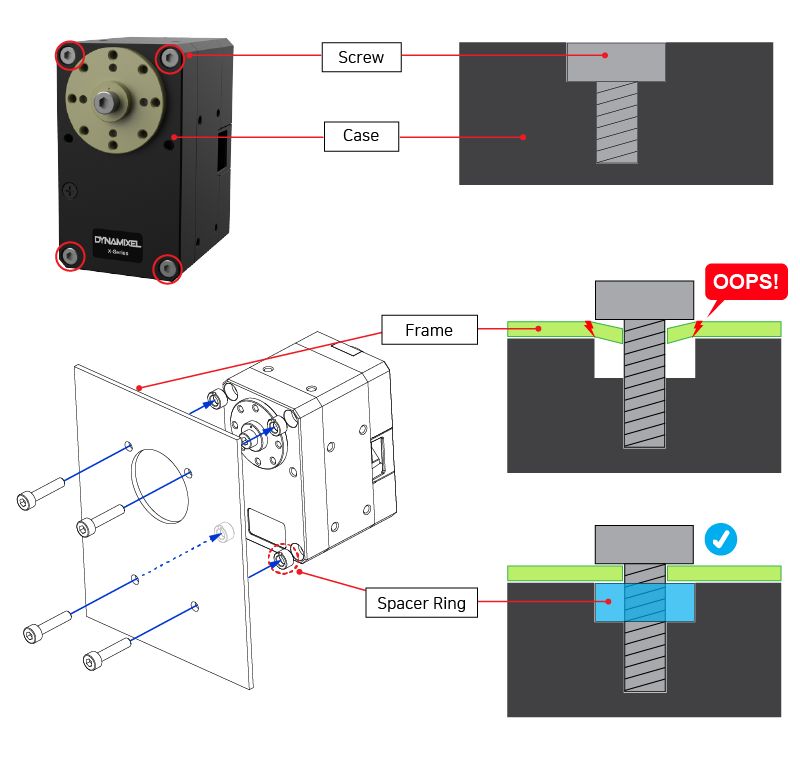
Il servomotore Dynamixel XC430-T150BB-T è un robusto dispositivo robotico che offre una varietà di modalità operative, una struttura di facile montaggio e un risparmio energetico grazie alla riduzione della corrente.
ROBOTIS ha ampliato la sua gamma di servomotori XC430 con l'XC430-T150BB-T. È dotato di encoder magnetici non intrusivi che consentono una rotazione completa di 360° a una velocità massima di 106 giri/min. Offre una coppia considerevole di 1,6 N.m a una tensione di 12 V, pur mantenendo un peso minimalista di 65 g. Questa combinazione di potenza e leggerezza lo rende un servomotore ad alte prestazioni di impiego universale.


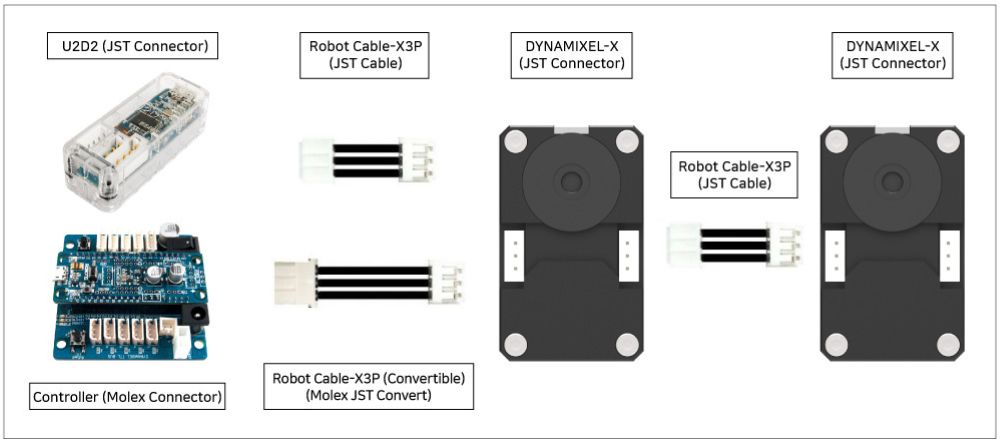
Contenuto della confezione:
Trovate le informazioni giuste sul servomotore Dynamixel XC430-T150BB-T con questo elenco di link compilato appositamente per voi:
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel XC430-T150BB-T è un robusto dispositivo robotico che offre una varietà di modalità operative, una struttura di facile montaggio e un risparmio energetico grazie alla riduzione della corrente.












{kind=link}