Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,05 € per l'ecotassa
Il servomotore Dynamixel XC430-W240-T offre una delle coppie più potenti della sua categoria, con un consumo energetico ridotto.
Riferimento del produttore: 902-0147-000
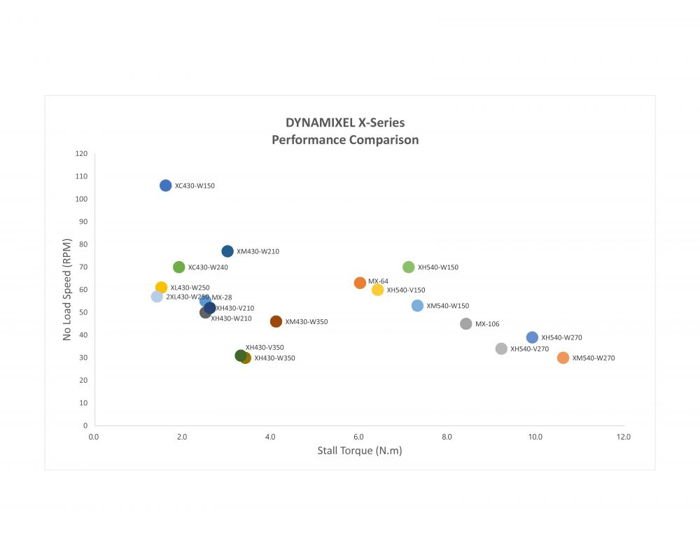
L'XC430-W240-T è un servomotore collegato in TTL con un rapporto di riduzione di 245,2:1 e una velocità a vuoto di 70 giri/min. Questo servomotore si posiziona al di sopra del servo XL 430 grazie alla sua coppia elevata e al consumo energetico ridotto. Le sue caratteristiche lo rendono ideale per i robot più potenti o per le macchine mobili progettate per i terreni accidentati.
Il servomotore Dynamixel XC430-W240-T viene fornito con una barra distanziatrice compatibile pronta per l'installazione e con un set completo di viti per il montaggio. Viene inoltre fornito con un cavo robotico X3P da 18 cm per il collegamento al microcontrollore.
Dynamixel di Robotis è una gamma completa di servomotori che incorpora tutti gli elementi essenziali per un servo intelligente, autonomo e ultra-adattabile. Con connessione RS232 o TTL, i servomotori Dynamixel possono essere adattati alle creazioni robotiche più complesse. Offrono diversi livelli di potenza e velocità, a seconda delle esigenze del progetto. Scegliete un rapporto di riduzione elevato per un veicolo fuoristrada o un robot progettato per trasportare carichi pesanti. Scegli un servomotore veloce per i dispositivi più agili.
Un servomotore Robotis Dynamixel è programmabile dalla A alla Z con un microcontrollore come Arduino o Raspberry Pi . Collegalo con un cavo robotico X3P: puoi concatenare più servomotori allo stesso modo.
I servomotori Dynamixel sono caratterizzati da un innovativo design a guscio che riduce la dissipazione del calore e consente diverse configurazioni di montaggio. Questo riduce anche le sollecitazioni sui cavi di collegamento.
Trova le informazioni giuste sul servomotore Dynamixel XC430-W240-T con questo elenco di link compilato appositamente per voi:
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Il servomotore Dynamixel XC430-W240-T offre una delle coppie più potenti della sua categoria, con un consumo energetico ridotto.
Riferimento del produttore: 902-0147-000