Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Including €0.05 for ecotax

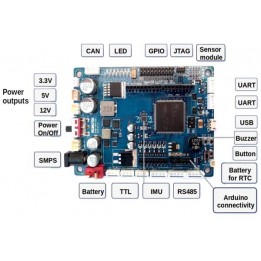
The CM-350 main controller contains a ARM Cortex STM32F103RE microcontroller, 3-pin connectors to communicate using TTL protocol and 5-pin connectors to add devices (sensors for example). It is designed to command Dynamixel servomotors from the ranges AX (bioloid kits) and MX-xxT (DarwinOp robot. Warning: the MX-xxR servomotors use RS485 communication protocol).
The CM-350 main controller supports Bluetooth and Zigbee communications.