Contrôleurs Dynamixel
Les contrôleurs (ou cartes de contrôle) permettent de piloter les servomoteurs Dynamixel qui donnent vie à vos créations robotiques. Ces cartes contrôleurs sont le cerveau de vos robots, elles embarquent le code de pilotage des servomoteurs et capteurs Dynamixel. La carte de contrôle rend le robot indépendant du PC de programmation.













La carte 4P JST est une carte d'extension permettant d'ajouter des fonctionnalités supplémentaires à votre robot.


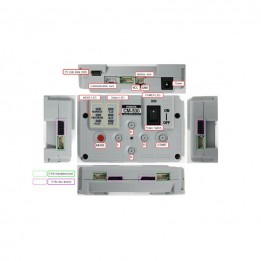
Ce contrôleur de servomoteur Dynamixel rassemble de multiples fonctionnalités pour un pilotage complet de la navigation du robot. Il inclut un ensemble varié de capteurs, et suffisamment de ports de connexion pour l'ajout de périphériques.

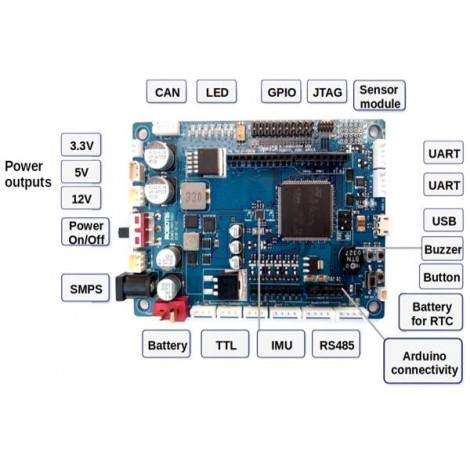
Cette carte de contrôle open source est le contrôleur idéal pour votre robot TurtleBot3 : un contrôleur pour ROS équipé d'un processeur ARM Cortex-M7, capable de prendre en charge vos servos Dynamixel et bien d'autres modules !


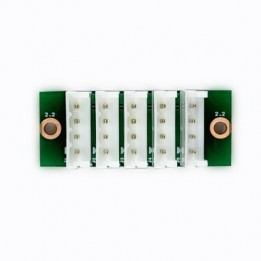
La carte d’extension OpenCM 485 se connecte sur votre contrôleur OpenCM9.04 pour bénéficier de ports Dynamixel supplémentaires.

La carte de contrôle CM-150 est utilisée pour la programmation de kits robotiques tels que le Robotis Dream Niveau 2. Elle permet la connexion de nombreux éléments : capteurs, motoréducteurs, modules LED, etc.).

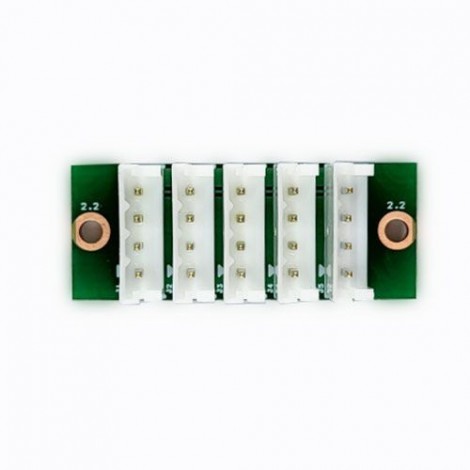
Complétez votre carte de contrôle OpenCM9.04-A pour servomoteurs Dynamixel vous même avec ce Pack d'accessoires de connectivité.



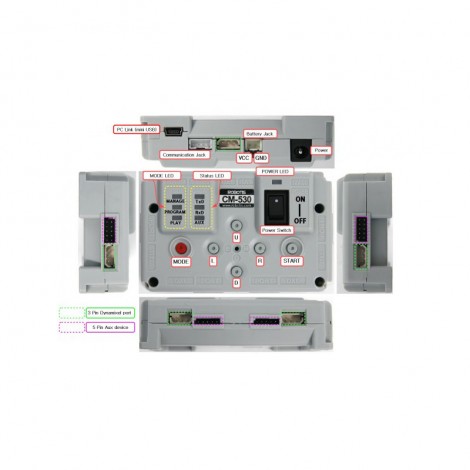
Le contrôleur CM-530 commande vos servomoteurs Dynamixel des gammes MX et AX. Il comporte un microcontrôleur ARM Cortex STM32F103RE et se programme en USB via le logiciel RoboPlus.