Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Le servomoteur Dynamixel XW540-T140-R de Robotis vient agrandir une famille déjà très nombreuse de servomoteurs haute définition. L'originalité de ce servomoteur ? Sa résistance à l'eau qui lui permet d'équiper plateformes amphibies et bases mobiles 100 % tout-terrain.
Les roboticiens amateurs, les chercheurs, les développeurs industriels connaissent très bien les vertus des servomoteurs Dynamixel série X.Le servomoteur XW540-T140-R respecte en tous points le cahier des charges avec sa haute résolution, sa vitesse de transmission, et ses multiples possibilités de programmation.
Si vous êtes à la recherche d'un accessoire robotique ultra-précis, offrant des retours d'information détaillés et de nombreux modes de contrôle, la série X vous tend les bras. Elle rassemble un nombre croissant de modèles plus ou moins rapides ou puissants, à connexion TTL ou, comme celui-ci, RS485. Nouveauté dans la gamme déjà bien fournie du fabricant, la série X-Waterproof ouvre de nouvelles portes aux roboticiens en quête d'aventures aquatiques.
Robotis a décliné ses servomoteurs étanches en deux modèles : le XW540-T260-R présente une vitesse 40 tours/minute. Il s'agit d'un servomoteur au couple puissant, capable d'évoluer sur terrains difficiles.
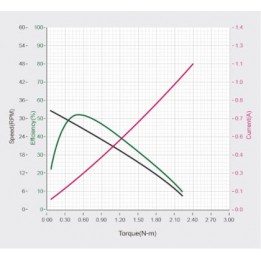
Le servomoteur Dynamixel XW540-T140-R, quant à lui, est presque deux fois plus rapide, pour un couple inférieur. C'est le servomoteur à sélectionner si vous cherchez à créer une machine d'exploration rapide, sans charge importante.
Ces deux servomoteurs se distinguent évidemment par leur degré de protection. IP68 correspond à la protection maximale en termes de pénétration de poussière. Son niveau d'étanchéité lui permet de rester immergé jusqu'à 24h en fonction de la profondeur (entre 1 et 3 mètres).
Profitez de ces nombreuses ressources en ligne et libres d'accès pour tout apprendre sur votre servomoteur Dynamixel XW540-T140-R.
Vérifiez que votre servomoteur Dynamixel est bien configuré. Reflashez avec le logiciel Roboplus puis le reconfigurer. Si le problème n'est pas résolu, contactez-nous. Pour consulter la procédure, vous pouvez vous renseigner via ce lien.
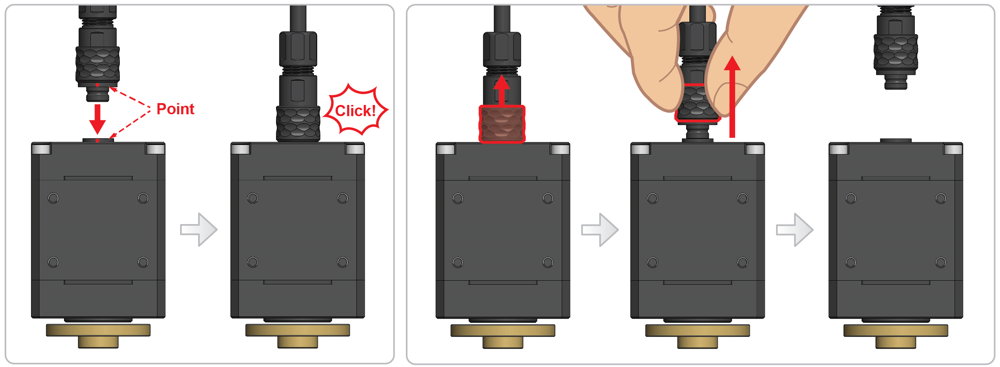
Le moteur est sûrement mal monté. Vérifiez que vous avez bien monté le palonnier en respectant le repère (point sur l'axe et à l'intérieur du palonnier).
Votre servomoteur Dynamixel a sûrement un problème mécanique. Vous pouvez directement nous contacter pour voir ce que l'on peut faire.
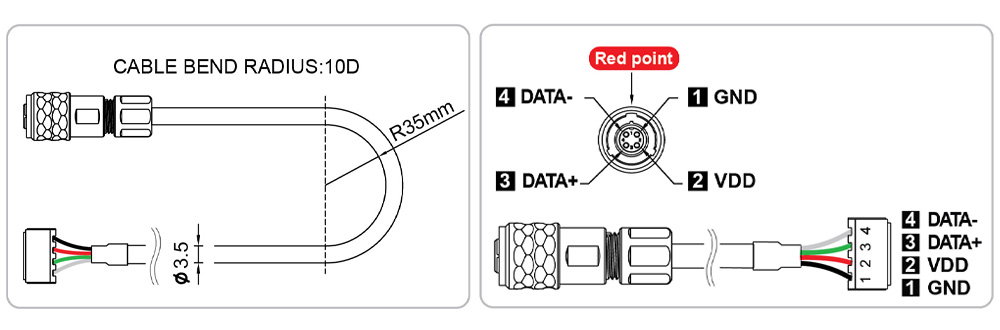
Vérifier votre alimentation et votre connectique (avec un autre moteur par exemple). Faire une réinitialisation de votre servo. Si le problème n'est pas résolu, suivre la checklist suivante (anglais)
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

Le servomoteur Dynamixel XW540-T140-R de Robotis vient agrandir une famille déjà très nombreuse de servomoteurs haute définition. L'originalité de ce servomoteur ? Sa résistance à l'eau qui lui permet d'équiper plateformes amphibies et bases mobiles 100 % tout-terrain.