")
")
")
")
")
Obtenez votre devis en 3 étapes !
1. Ajoutez les articles qui vous intéressent dans votre panier
2. Rendez-vous sur votre panier
3. Cliquez sur OBTENIR UN DEVIS
Tous vos devis sont accessibles à partir de votre compte client.
Découvrez LIMO, un robot mobile conçu sur la base d'une plateforme mobile Agilex. Cette structure robotisée évolutive est dédiée au développement d'intelligence artificielle. LIMO est disponible en 2 versions : LIMO et LIMO PRO (compatible ROS 2).
Le robot mobile LIMO est compatible avec ROS (1 et 2) et le simulateur Gazebo. Vous avez ainsi accès à une longue liste de démos et échantillons de programmes libres d'accès pour la mise au point de votre intelligence artificielle.
LIMO vous permet d'exploiter de nombreuses possibilités en termes de navigation autonome :
Grâce à sa caméra et son LiDAR embarqués, ainsi qu'une solide centrale d'inertie, votre robot mobile LIMO explore, repère, surveille et analyse son environnement à la manière d'une véritable sentinelle. L'idéal pour vos applications de sécurité et de surveillance, mais aussi pour créer un UGV autonome capable de cartographier tous les lieux qu'il traverse.
La plateforme robotique LIMO se décline en 2 versions : une version standard et une version pro (compatible ROS 2)
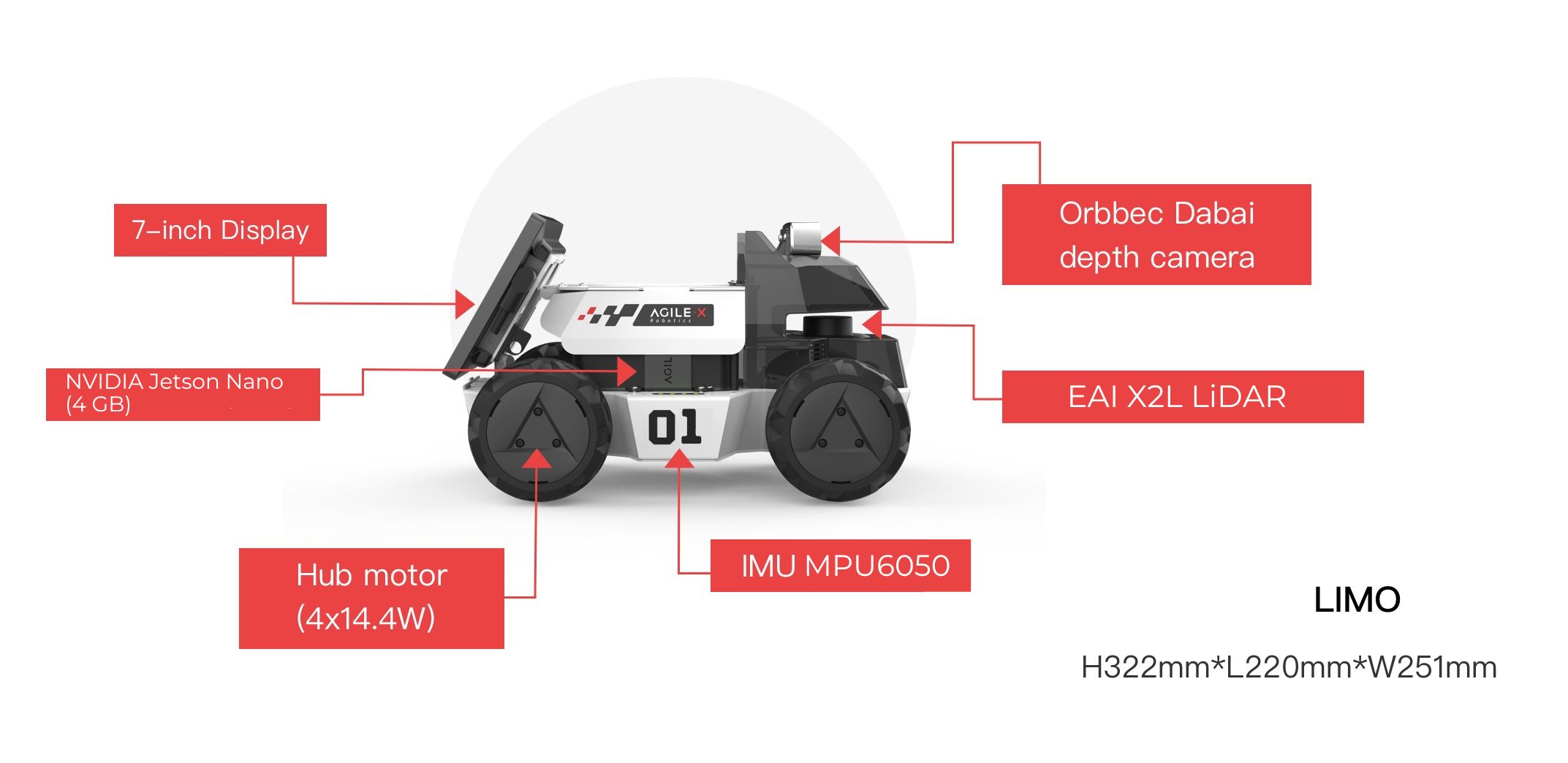
Le robot mobile LIMO, dans sa version basique, comprend une Nvidia Jetson Nano, un LiDAR EAI X2L et une caméra de profondeur Orbecc DaBai.
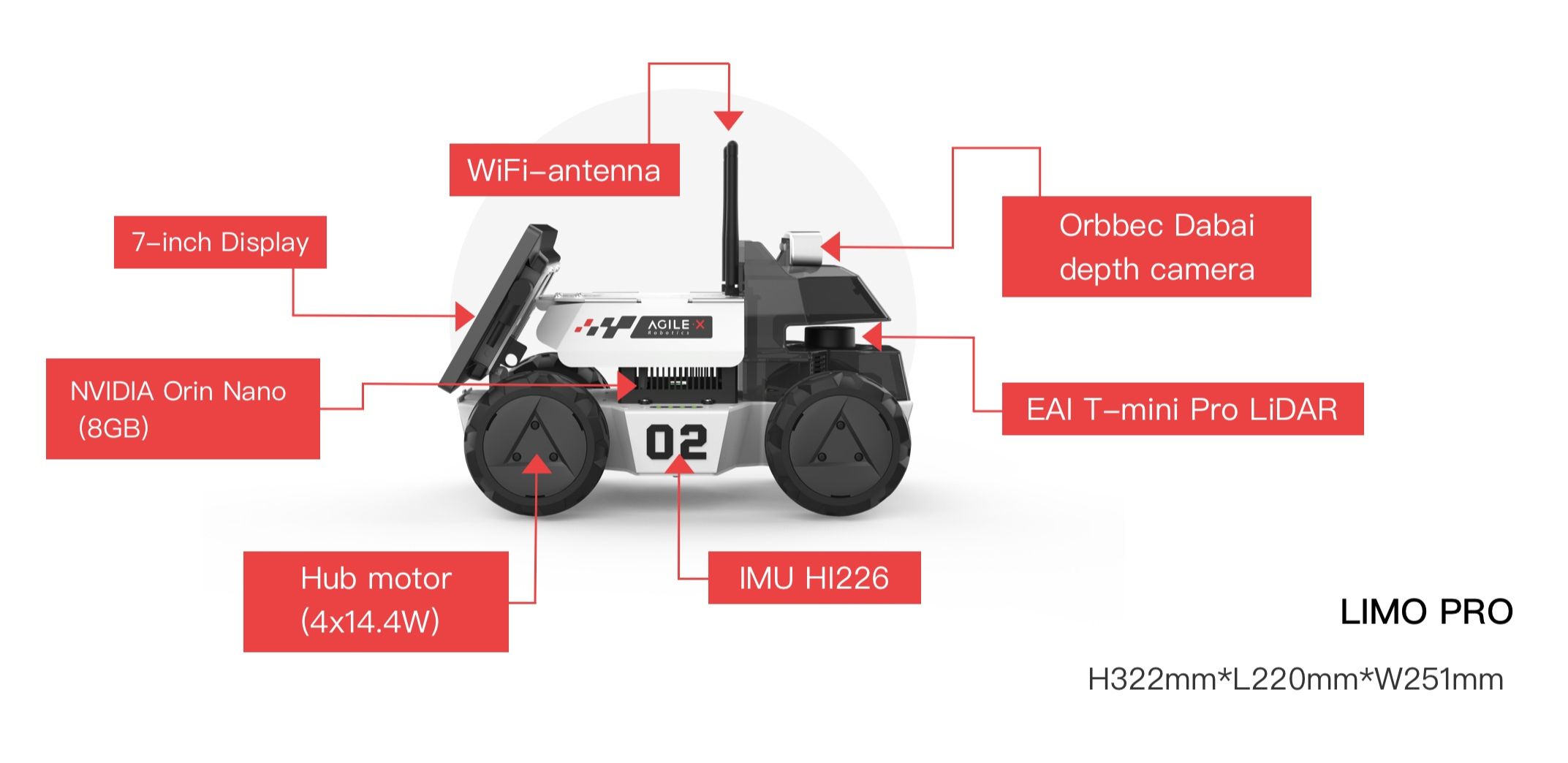
Le robot mobile LIMO PRO intègre la NVIDIA Orin Nano, un LiDAR EAT T-mini Pro et la caméra de profondeur Orbbec Dabai. Ces différents capteurs permettent au robot d'avoir une perception robuste de son environnement. Il est idéal pour développer des applications de navigation autonome, d'évitement d'obstacles et de reconnaissance visuelle.
LIMO PRO est une plateforme robotique idéale pour les étudiants et les chercheurs. Ses nombreux capteurs et ses logiciels de pointe facilitent l'apprentissage immersif.
LIMO Pro est compatible avec ROS 1 Noetic et ROS 2 Foxy pour une intégration logicielle flexible. L'autonomie de sa batterie permet jusqu'à 2,5 heures d'utilisation en continu.
| LIMO | LIMO PRO | |
| Dimensions | 322*220*251mm | 322*220*251mm |
| Poids | 4.8kg | 4.8kg |
| Charge utile | 4kg | 4kg |
| Garde au sol | 24mm | 24mm |
| Structure de pilotage | 40 N·m | 40 N·m |
| Ecran | 7 pouces | 7 pouces |
| Ordinateur | Jeston Nano | Orin Nano |
| Caméra de profondeur | Orbbec DaBai | Orbbec DaBai |
| LiDAR | EAI X2L | EAI T-mini Pro |
| Batterie | 5.2Ah 12V | 10Ah 12V |
| Autonomie | 1H | 2.5H |
| Autonomie en veille | 2H | 4H |
| Système d'exploitation | Ubuntu 18.04 | Ubunutu 20.04 |
| Version ROS | ROS1 Melodic | ROS1 Noetic/ROS2 Foxy |
| Méthode de contrôle | Application mobile/commande | Application mobile/commande |
| Plage de contrôle de l'application | 10m | 10m |
| LIMO | LIMO PRO | |
| Dimensions | 322*220*251mm | 322*220*251mm |
| Poids | 4.8kg | 4.8kg |
| Charge utile | 4kg | 4kg |
| Garde au sol | 24mm | 24mm |
| Empattement | 200 mm | 200 mm |
| Bande de roulement | 175 mm | 175 mm |
| Type de moteur | Moteur moyeu (4x14.4W) | Moteur moyeu (4x14.4W) |
| Vitesse max | 1 m/s | 1 m/s |
| Rayon de braquage minimum Ackermann | 0,4 m | 0,4 m |
| Température de fonctionnement | -10°C ~ +40°C | -10°C ~ +40°C |
| Hauteur d'obstacles | 40° | 40° |
| Interface d'alimentation | DC (5.5x2.1mm) | DC (5.5x2.1mm) |
| Système d'exploitation | Ubuntu 18.04 | Ubunutu 20.04 |
| IMU | MPU6050 | HI22 |
| CPU | - | 6 Core Arm@ Cortex@-A78AE |
| GPU | - | 1024-core CUDA |
| Batterie | 5.2Ah 12V | 10Ah 12V |
| Autonomie | 1H | 2.5H |
| Autonomie en veille | 2H | 4H |
| Interface de communication | Wifi, Bluetooth | Wifi, Bluetooth |
| LiDAR | EAI X2L | EAI T-mini Pro |
| Caméra de profondeur | Orbbec DaBai | Orbbec DaBai |
| Ordinateur | Jeston Nano 4G | Jetson Orin Nano 8G |
| Ports USB | TYPE-C x1,USB2.0 x2 | TYPE-C x1,USB2.0 x2 |
| Ecran | 7 pouces | 7 pouces |
| Version ROS | ROS1 Melodic | ROS1 Noetic/ROS2 Foxy |
| Méthode de contrôle | Application mobile/commande | Application mobile/commande |
| Plage de contrôle de l'application | 10m | 10m |

")
Découvrez LIMO, un robot mobile conçu sur la base d'une plateforme mobile Agilex. Cette structure robotisée évolutive est dédiée au développement d'intelligence artificielle. LIMO est disponible en 2 versions : LIMO et LIMO PRO (compatible ROS 2).