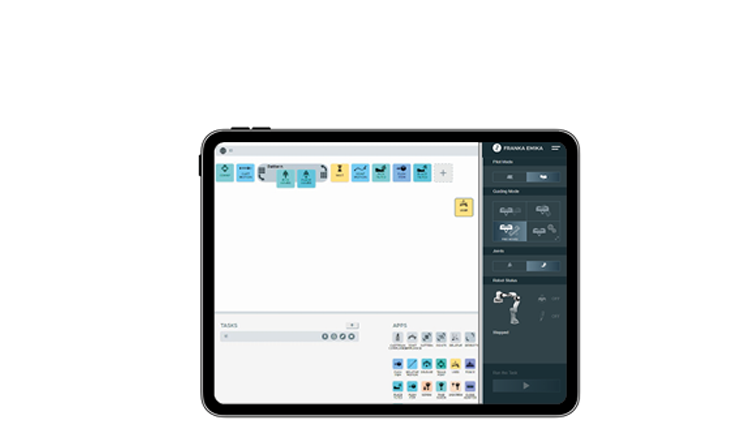
Applications are pre-programmed, encapsulated robotic skills that can be combined in Desk to automate entire tasks in no time at all.
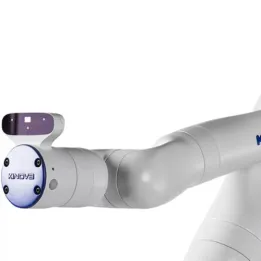
The FR3 robotic arm has been designed to be versatile and quick to learn, so that it can be easily deployed in a wide range of environments, such as :
- E-Health
- Research laboratories
- Universities and engineering schools
- Etc
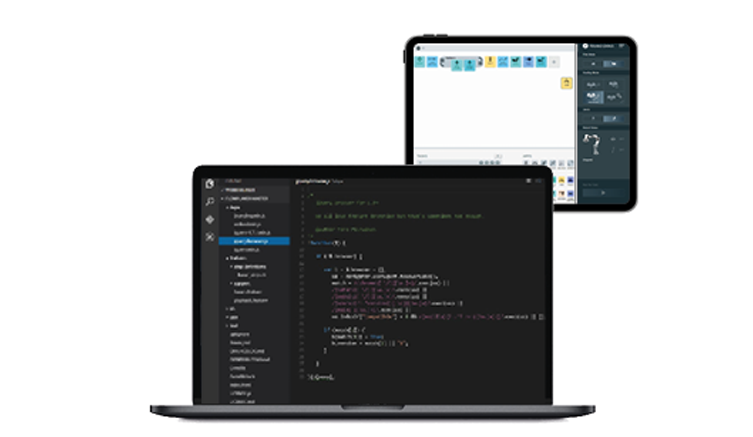
Combining precision, C++ and ROS integration, ease-of-use and low cost, the FR3 robotic arm is a Plug-and-Play platform that universities and research laboratories love.