FAQ – Robot quadrupède AgiBot D1 Pro
Qu’est-ce que le robot quadrupède AgiBot D1 Pro ?
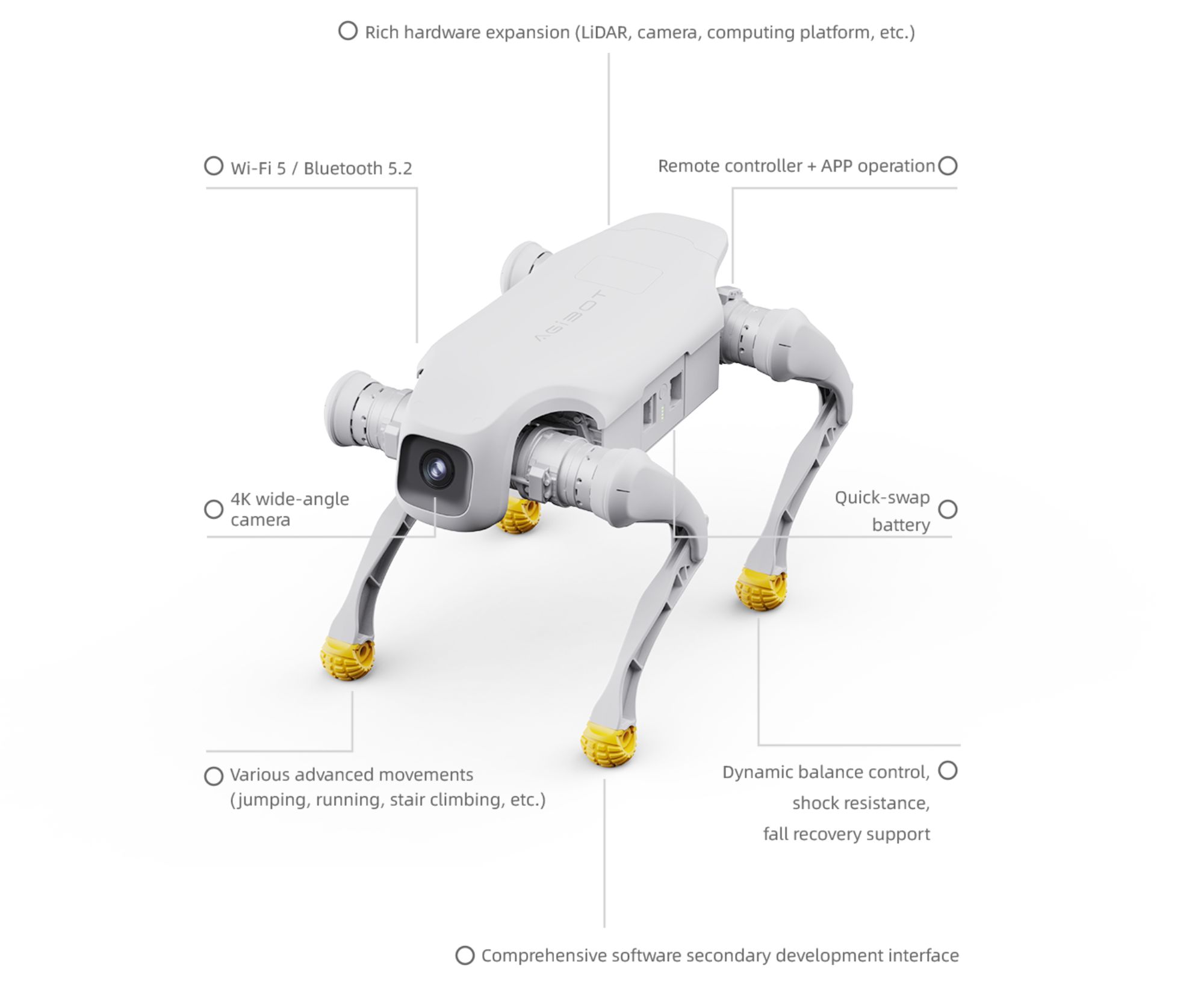
Le AgiBot D1 Pro est un robot quadrupède conçu pour la démonstration, certains projets d’enseignement supérieur, la recherche appliquée et des scénarios légers d’exploration ou d’inspection. Il se distingue notamment par une locomotion dynamique fondée sur le reinforcement learning, pensée pour améliorer la stabilité, l’agilité et l’adaptation au terrain.
Quelles sont les performances de mobilité du D1 Pro ?
Le D1 Pro est présenté avec une vitesse élevée pour sa catégorie, des capacités de franchissement de marches, de saut et de déplacement sur pente. Selon la configuration et le scénario d’usage, il peut convenir à des environnements avec sols irréguliers, petites marches et obstacles modérés. Pour un projet concret, il reste conseillé de valider les performances attendues selon le terrain réel, la charge embarquée et les conditions d’exploitation.
Pourquoi le D1 Pro peut-il être intéressant pour un laboratoire, une école ou un démonstrateur ?
Le AgiBot D1 Pro permet d’accéder à une plateforme quadrupède agile sans se positionner sur un budget de robot industriel plus élevé. Il peut ainsi constituer une base intéressante pour des projets autour de la locomotion, de la perception mobile, de la navigation sur terrain varié ou de la robotique incarnée dans un cadre pédagogique, exploratoire ou événementiel.
Le robot est-il adapté à l’enseignement supérieur et à la recherche ?
Oui, le D1 Pro peut convenir à des universités, écoles d’ingénieurs et laboratoires qui souhaitent travailler sur la mobilité quadrupède, l’adaptation au terrain, la navigation guidée par la perception ou encore la fusion de données issues de plusieurs capteurs. Il faut toutefois bien vérifier que la version Pro correspond au niveau d’ouverture et d’intégration attendu pour votre projet.
Le D1 Pro est-il pertinent pour des démonstrations publiques ou des événements ?
Oui, son agilité, sa vitesse et ses mouvements dynamiques en font une plateforme intéressante pour des démonstrations technologiques, des événements STEM, des salons professionnels ou des animations orientées innovation. Il convient particulièrement aux scénarios où l’impact visuel, la mobilité et la fiabilité priment sur l’emport de charges lourdes.
Peut-on envisager des usages d’inspection légère ou de sécurité ?
Le D1 Pro peut convenir à des pilotes ou démonstrateurs d’inspection légère sur des sites comportant marches, pentes ou sols irréguliers, par exemple sur un campus, dans un bâtiment technique ou sur un site de démonstration. Pour des cycles de service plus intensifs, des contraintes environnementales plus fortes ou un besoin accru en protection, il peut être pertinent d’étudier une version plus robuste ou une autre plateforme quadrupède.